


介绍
memcache 使用了 Slab Allocator 的内存分配机制, 按照预先规定的大小, 将待分配的内存划分不同的区域并分割成特定长度的块,每个区域块只存放相对应大小的数据,以达到解决内存碎片问题, 因为不断的 malloc() 不同大小的内存块会产生大量的内存碎片,所以 memcache 实现了自己的内存管理机制,下面就让我们看一下 memcache 内部是如何实现内存管理并划分不同长度的块.
数据结构
存放 key-value 数据的结构体 item
typedef struct _stritem {
struct _stritem *next; /* next item */
struct _stritem *prev; /* prev item */
struct _stritem *h_next; /* hash chain next */
rel_time_t time; /* least recent access */
rel_time_t exptime; /* expire time */
int nbytes; /* size of data */
unsigned short refcount; /* 引用计数,只要有线程操作该item就会++1 */
uint8_t nsuffix; /* length of flags-and-length string */
uint8_t it_flags; /* ITEM_* above */
uint8_t slabs_clsid;/* which slab class we're in */
uint8_t nkey; /* key length, w/terminating null and padding */
/* this odd type prevents type-punning issues when we do
* the little shuffle to save space when not using CAS. */
union {
uint64_t cas;
char end;
} data[];
/* if it_flags & ITEM_CAS we have 8 bytes CAS */
/* then null-terminated key */
/* then " flags length\r\n" (no terminating null) */
/* then data with terminating \r\n (no terminating null; it's binary!) */
} item;slabclass 是什么?
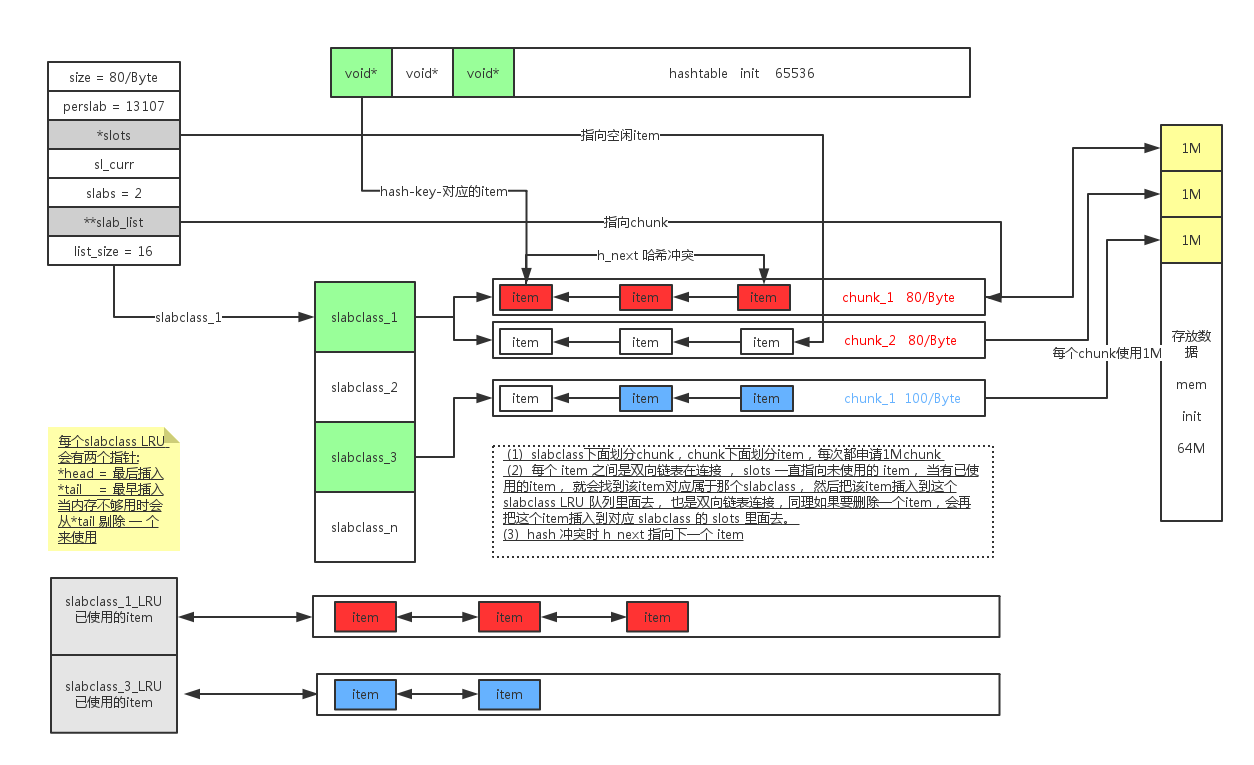
memcache 内存模型会对初始化申请的 (内存区域) 进行切分,会切分成不同大小的item区域,比如切分成三块区域 item-24Byte -> item-48Byte -> item-96Byte 这样在每个切分的区域,只保存对应大小的item、而slabclass数组就是记录每个item区域的使用情况即详情.
item 在对应大小的区域又是如何保存?
现在已经有对应大小的item区域了, 然后在该区域里面又会以 chunk 进行划分,默认每个chunk为1M,就是先有 slabclass 然后在每个 slabclass 指向区域划分chunk , 然后在chunk区域进行划分item
例如:slabclass[1] -> chunk_1 -> [item-24Byte、item-24Byte、item-24Byte]
chunk_2 -> [item-24Byte、item-24Byte、item-24Byte]
记录每个item区域使用情况的结构体 slabclass
#define MAX_NUMBER_OF_SLAB_CLASSES (63 + 1) slabclass 数组大小 , 最多不超过 64
static slabclass_t slabclass[MAX_NUMBER_OF_SLAB_CLASSES];
typedef struct {
unsigned int size; /* item区域大小 */
unsigned int perslab; /* 每个chunk下可以保存item数量 */
void *slots; /* 空闲的item */
unsigned int sl_curr; /* 空闲的item数量 */
unsigned int slabs; /* chunk指针数组数量 */
void **slab_list; /* chunk指针数组 */
unsigned int list_size; /* 预申请chunk指针数组的数量 */
size_t requested; /* The number of requested bytes */
} slabclass_t;memcache 内存模型
三个主要的配置参数:
- settings.maxbytes 存放数据内存大小默认64M
- settings.factor 增长因子 1.25
- preallocate 是否预申请内存
增长因子factor是什么?
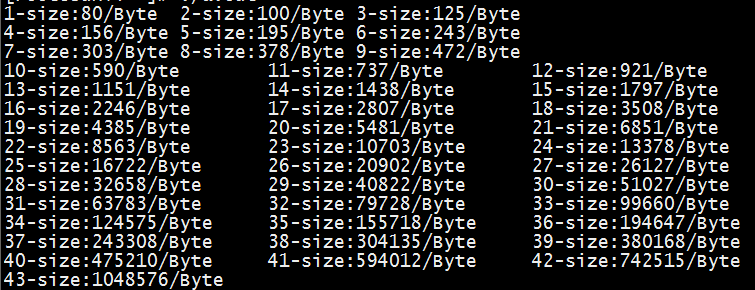
因为 memcache 会对内存进行划分不同区域大小的块,但是会默认一个最小存放数据区域块大小 size = 80/Byte 而增长因子就是以最小区域块为基础,每次递增的倍数,但是最大递增不能超过 62 个且 size*factor < 1M,下面代码会有说明,就是保证我们最多有 62 个不同大小的内存区域块,每个区域块都是 factor 倍数,且最后一个区域块一定是 1M , 所以我们可以根据实际使用情况来调节增长因子大小
例:
按照默认 1.25 进行增长,一共初始化 43 个区域,且每个区域之间都是 1.25 倍数,倒数第二个区域乘于 1.25 一定小于 1M , 因为最后一个区域等于 1M,这也说明Memcache存放数据的最大为1M.
源码实现
(一) slabs_init 初始化内存
void slabs_init(const size_t limit, const double factor, const bool prealloc) {
int i = POWER_SMALLEST - 1; //#define POWER_SMALLEST 1
//最小数据块size
//sizeof(item) 存放数据的结构体 = 32
//settings.chunk_size 默认存放物理数据大小 = 48
//size = 48 + 32 = 80/Byte
unsigned int size = sizeof(item) + settings.chunk_size;
//申请的内存总大小默认64M
mem_limit = limit;
//是否预申请一块内存区域,并直接指向该内存区域
if (prealloc) {
/* Allocate everything in a big chunk with malloc */
mem_base = malloc(mem_limit);
if (mem_base != NULL) {
mem_current = mem_base;
mem_avail = mem_limit;
} else {
//.......
}
}
//slabclass数组置空
memset(slabclass, 0, sizeof(slabclass));
//按照 size * factor 填充 slabclass 数组
//不能超过 MAX_NUMBER_OF_SLAB_CLASSES - 1 && 保证 size * factor 不能大于 settings.item_size_max
while (++i < MAX_NUMBER_OF_SLAB_CLASSES-1 && size <= settings.item_size_max / factor) {
/* Make sure items are always n-byte aligned */
if (size % CHUNK_ALIGN_BYTES) //8字节对其
size += CHUNK_ALIGN_BYTES - (size % CHUNK_ALIGN_BYTES);
//每个slabclass组可存放item的大小
slabclass[i].size = size;
//每个chunk下可以保存item数量
slabclass[i].perslab = settings.item_size_max / slabclass[i].size;
//乘与增长因子继续填充
size *= factor;
//.....
}
//保存最后一个元素的索引位置
power_largest = i;
//保证slab组最后一个可存放的item大小为settings.item_size_max 也就是1M
slabclass[power_largest].size = settings.item_size_max;
slabclass[power_largest].perslab = 1;
//.....
//为测试提供的,模拟先占用多少内存
/* for the test suite: faking of how much we've already malloc'd */
{
char *t_initial_malloc = getenv("T_MEMD_INITIAL_MALLOC");
if (t_initial_malloc) {
mem_malloced = (size_t)atol(t_initial_malloc);
}
}
//如果是预申请则按照每个 slabclass[i].size 区域大小去划分
//chunk_1 -> [item-24Byte、item-24Byte、item-24Byte]
//chunk_1 -> [item-48Byte、item-48Byte、item-48Byte]
if (prealloc) {
slabs_preallocate(power_largest);
}
}(二) slabs_preallocate 对预申请的内存进行划分
static void slabs_preallocate (const unsigned int maxslabs) {
int i;
unsigned int prealloc = 0;
//循环执行
for (i = POWER_SMALLEST; i < MAX_NUMBER_OF_SLAB_CLASSES; i++) {
// 判断是否超出当前slabclass最大索引
if (++prealloc > maxslabs)
return;
//一个一个进行划分
if (do_slabs_newslab(i) == 0) {
fprintf(stderr, "Error while preallocating slab memory!\n"
"If using -L or other prealloc options, max memory must be "
"at least %d megabytes.\n", power_largest);
exit(1);
}
}
}(三) do_slabs_newslab 根据每个slabclass区域大小进行划分
static int do_slabs_newslab(const unsigned int id) {
slabclass_t *p = &slabclass[id]; //根据索引取出slabclass
slabclass_t *g = &slabclass[SLAB_GLOBAL_PAGE_POOL];
// 获取待申请chunk大小,理论上每个 chunk <= 1M(1048576/Byte)
// 但是有些情况 size * perslab 不会正好等于 1M 而是小于 1M
// 那么我们按照1M申请就会有一些字节浪费掉.
// 比如第一个slabclass的区域是 80/Byte 如果按每个chunk为1M 那么 perslab = 1M/80 = 13107/item
// 就是一个chunk里面会有13107个item , 但是 13107 * 80 = 1048560/Byte 小于 1M(1048576/Byte)
// 所以这里的判断就是按照什么方式去申请这chunk空间,如果不想有字节浪费掉就 p->size * p->perslab
int len = settings.slab_reassign ? settings.item_size_max
: p->size * p->perslab;
char *ptr;
// 判断内存使用是否超过最大设定
if ((mem_limit && mem_malloced + len > mem_limit && p->slabs > 0
&& g->slabs == 0)) {
mem_limit_reached = true;
MEMCACHED_SLABS_SLABCLASS_ALLOCATE_FAILED(id);
return 0;
}
// grow_slab_list 获取chunk指针数组,就是 void **slab_list 、 list_size
// get_page_from_global_pool 忽略.
// memory_allocate 申请一块 chunk 区域,并更新内存使用量
if ((grow_slab_list(id) == 0) ||
(((ptr = get_page_from_global_pool()) == NULL) &&
((ptr = memory_allocate((size_t)len)) == 0))) {
MEMCACHED_SLABS_SLABCLASS_ALLOCATE_FAILED(id);
return 0;
}
// chunk指针初始化置空
memset(ptr, 0, (size_t)len);
// chunk区域有了,就在chunk中进行划分item
split_slab_page_into_freelist(ptr, id);
// 保存当前chunk的指针, 并更新 p->slabs++
p->slab_list[p->slabs++] = ptr;
MEMCACHED_SLABS_SLABCLASS_ALLOCATE(id);
return 1;
}(四) grow_slab_list 获取chunk指针数组,不存在则创建,存在且空间不够则扩容
static int grow_slab_list (const unsigned int id) {
slabclass_t *p = &slabclass[id];
// 判断当前 chunk指针数组索引 是否等于 list_size 如果等于就会进行扩容
// 初始化情况会等于
if (p->slabs == p->list_size) {
// 默认 slab_list 数组大小 16
// 之后在扩充每次2的倍数进行扩容
size_t new_size = (p->list_size != 0) ? p->list_size * 2 : 16;
void *new_list = realloc(p->slab_list, new_size * sizeof(void *));
if (new_list == 0) return 0;
// 预申请 chunk 指针数组的数量
p->list_size = new_size;
// 指向该数组
p->slab_list = new_list;
}
return 1;
}(五) memory_allocate 申请一块 chunk 区域 , 并更新内存使用量
static void *memory_allocate(size_t size) {
void *ret;
// 判断是否为预申请模式,如果不是则每次 malloc 申请 1M
if (mem_base == NULL) {
/* We are not using a preallocated large memory chunk */
ret = malloc(size);
} else {
//当前内存使用位置
ret = mem_current;
// size 不能大于最大的mem_avail内存块
if (size > mem_avail) {
return NULL;
}
/* mem_current pointer _must_ be aligned!!! */
if (size % CHUNK_ALIGN_BYTES) {
size += CHUNK_ALIGN_BYTES - (size % CHUNK_ALIGN_BYTES);
}
// 获取一块size大小内存,并更新内存使用位置
mem_current = ((char*)mem_current) + size;
// 更新一下mem_avail,就是还剩多少内存
if (size < mem_avail) {
mem_avail -= size;
} else {
mem_avail = 0;
}
}
//更新一下内存使用量, 就是已使用了多少内存
mem_malloced += size;
// 返回当前申请的内存,也就是 chunk 区域
return ret;
}(六) split_slab_page_into_freelist 根据给定的 chunk区域指针 进行划分item
static void split_slab_page_into_freelist(char *ptr, const unsigned int id) {
slabclass_t *p = &slabclass[id];
int x;
// 当前chunk区域共有多少 perslab 就是 item
for (x = 0; x < p->perslab; x++) {
// 一个一个进行划分
do_slabs_free(ptr, 0, id);
ptr += p->size;
}
}(七) do_slabs_free 划分item
static void do_slabs_free(void *ptr, const size_t size, unsigned int id) {
slabclass_t *p;
item *it;
assert(id >= POWER_SMALLEST && id <= power_largest);
if (id < POWER_SMALLEST || id > power_largest)
return;
MEMCACHED_SLABS_FREE(size, id, ptr);
p = &slabclass[id];
it = (item *)ptr; //强制转换成item结构体指针
it->it_flags = ITEM_SLABBED;
it->slabs_clsid = 0;
// 每一个item都已双向链表形式连接
it->prev = 0;
it->next = p->slots;
if (it->next) it->next->prev = it;
// slots 一直指向这个空闲item链表
p->slots = it;
// 更新一下当前可使用item数量
p->sl_curr++;
p->requested -= size;
return;
}结束
上面介绍的函数就是Memcache启动的时候,初始化内存所涉及到的所有核心函数实现
