

CameraService启动
CameraService是在MediaServer启动过程中进行的
main_mediaserver.cpp (frameworks\av\media\mediaserver)
......
AudioFlinger::instantiate(); //audioflinger服务,音频相关
MediaPlayerService::instantiate(); //mediaplayerservice,媒体播放相关
CameraService::instantiate();//CameraService
AudioPolicyService::instantiate(); //音频相关
......在 main函数中会执行到CameraService::instantiate(), CameraService 本身并没有实现这个方法
CameraService.cpp (frameworks\av\services\camera\libcameraservice)
CameraService.h (frameworks\av\services\camera\libcameraservice)
BinderService.h (frameworks\native\include\binder)
class CameraService :
public BinderService<CameraService>,
public BnCameraService,
public IBinder::DeathRecipient,
public camera_module_callbacks_t
{
......
}在其父类中寻找instantiate()函数,BinderService是一个模板类
template<typename SERVICE>
class BinderService
{
public:
static status_t publish(bool allowIsolated = false) { //BinderService::publish
sp<IServiceManager> sm(defaultServiceManager()); //拿到ServiceManager的Bp
return sm->addService(
String16(SERVICE::getServiceName()),
new SERVICE(), allowIsolated); //这里的SERVICE就是CameraService
}
.....
static void instantiate() { publish(); } //BinderService::instantiate
.....
};这里会new CameraService(),
CameraService::CameraService()
:mSoundRef(0), mModule(0)
{
ALOGI("CameraService started (pid=%d)", getpid());
gCameraService = this; //保存一个本地指针
for (size_t i = 0; i < MAX_CAMERAS; ++i) {
mStatusList[i] = ICameraServiceListener::STATUS_PRESENT;
}
this->camera_device_status_change = android::camera_device_status_change;
}到这里,CameraService就启动了。
Camera连接过程
Camera.java (frameworks\base\core\java\android\hardware)
Camera.cpp (frameworks\av\camera)
android_hardware_Camera.cpp (frameworks\base\core\jni)
从java->jni->CPP的典型过程
首先从Camera.java入手,这里通过open()方法,创建Camera
public static Camera open(int cameraId) {
return new Camera(cameraId);
}
public static Camera open() {
int numberOfCameras = getNumberOfCameras();
CameraInfo cameraInfo = new CameraInfo();
for (int i = 0; i < numberOfCameras; i++) {
getCameraInfo(i, cameraInfo);
if (cameraInfo.facing == CameraInfo.CAMERA_FACING_BACK) {
return new Camera(i);
}
}
return null;
}两个open()方法,默认打开后置摄像头,new Camera()对象,
Camera(int cameraId) {
int err = cameraInitNormal(cameraId);//做事的主要地方
if (checkInitErrors(err)) {
switch(err) { //通过返回的错误信息,抛不同的异常信息
case EACCESS:
throw new RuntimeException("Fail to connect to camera service");
case ENODEV:
throw new RuntimeException("Camera initialization failed");
default:
// Should never hit this.
throw new RuntimeException("Unknown camera error");
}
}
}接下来看下代码,最后会落脚到哪一块呢?
private int cameraInitNormal(int cameraId) {
//这里的CAMERA_HAL_API_VERSION_NORMAL_CONNECT后面会提到用来区别不同的connect
return cameraInitVersion(cameraId, CAMERA_HAL_API_VERSION_NORMAL_CONNECT);
}
......
private int cameraInitVersion(int cameraId, int halVersion) {
mShutterCallback = null;
mRawImageCallback = null;
mJpegCallback = null;
mPreviewCallback = null;
mPostviewCallback = null;
mUsingPreviewAllocation = false;
mZoomListener = null; //初始化几个callback和一些变量
Looper looper; //mEventHandler后面会讲到是对底层上报内容的处理handler
if ((looper = Looper.myLooper()) != null) {
mEventHandler = new EventHandler(this, looper);
} else if ((looper = Looper.getMainLooper()) != null) {
mEventHandler = new EventHandler(this, looper);
} else {
mEventHandler = null;
}
String packageName = ActivityThread.currentPackageName();
return native_setup(new WeakReference<Camera>(this), cameraId, halVersion, packageName);
}可以看到native_setup是一个native方法,具体实现在
android_hardware_Camera.cpp (frameworks\base\core\jni)
static jint android_hardware_Camera_native_setup(JNIEnv *env, jobject thiz,
jobject weak_this, jint cameraId, jint halVersion, jstring clientPackageName)
{
......
sp<Camera> camera;
//之前在创建Camera对象的时候设置的一个常量,此时走到connect方法
if (halVersion == CAMERA_HAL_API_VERSION_NORMAL_CONNECT) {
// Default path: hal version is don't care, do normal camera connect.
camera = Camera::connect(cameraId, clientName,
Camera::USE_CALLING_UID);
} else {
jint status = Camera::connectLegacy(cameraId, halVersion, clientName,
Camera::USE_CALLING_UID, camera);
if (status != NO_ERROR) {
return status;
}
}
......
// We use a weak reference so the Camera object can be garbage collected.
// The reference is only used as a proxy for callbacks.
sp<JNICameraContext> context = new JNICameraContext(env, weak_this, clazz, camera);
context->incStrong((void*)android_hardware_Camera_native_setup);
camera->setListener(context);//listener用于处理底层数据上报
// save context in opaque field
env->SetLongField(thiz, fields.context, (jlong)context.get());
return NO_ERROR;
}从JNI往下就是CPP,继续探寻Camera连接过程
Camera.cpp (frameworks\av\camera)
CameraBase.cpp (frameworks\av\camera)
sp<Camera> Camera::connect(int cameraId, const String16& clientPackageName,
int clientUid)
{ //CameraBaseT为模板类
return CameraBaseT::connect(cameraId, clientPackageName, clientUid);
}CameraBase中connect函数模板替换成
sp<Camera> CameraBase<Camera, CameraTraits<Camera>>::connect(int cameraId,
const String16& clientPackageName,
int clientUid)
{
ALOGV("%s: connect", __FUNCTION__);
sp<Camera> c = new Camera(cameraId);
sp<ICameraClient> cl = c;
status_t status = NO_ERROR;
const sp<ICameraService>& cs = getCameraService();//获取CameraService的Bp
if (cs != 0) {
//这里TCamConncectService是一个函数指针,指向的是ICameraService中的connect方法
TCamConnectService fnConnectService = TCamTraits::fnConnectService;
status = (cs.get()->*fnConnectService)(cl, cameraId, clientPackageName, clientUid,
/*out*/ c->mCamera);
status = (cs.get()->*fnConnectService)(cl, cameraId, clientPackageName, clientUid,
/*out*/ c->mCamera);
}
if (status == OK && c->mCamera != 0) {
c->mCamera->asBinder()->linkToDeath(c);
c->mStatus = NO_ERROR;
} else {
ALOGW("An error occurred while connecting to camera: %d", cameraId);
c.clear();
}
return c;
}这里可能有点绕,稍微讲解一下,模板上
template 这里TCam化成Camera应该比较清晰,而TCamTraits的替换,首先从CameraBase.h文件中看
template <typename TCam>
struct CameraTraits {
};
template <typename TCam, typename TCamTraits = CameraTraits<TCam> >然后我们再到Camera.h中看
template <>
struct CameraTraits<Camera>
{
typedef CameraListener TCamListener;
typedef ICamera TCamUser;
typedef ICameraClient TCamCallbacks;
typedef status_t (ICameraService::*TCamConnectService)(const sp<ICameraClient>&,
int, const String16&, int,
/*out*/
sp<ICamera>&);
static TCamConnectService fnConnectService;
};中间有些过程,应该好理解了,这里绕了一下,最后落脚到ICameraService.cpp中的connect方法,这一部分涉及到Binder机制比较多,暂时先不讲解具体内容,注意调用的地方即可。
ICameraService.cpp (frameworks\av\camera)
// connect to camera service (android.hardware.Camera)
virtual status_t connect(const sp<ICameraClient>& cameraClient, int cameraId,
const String16 &clientPackageName, int clientUid,
/*out*/
sp<ICamera>& device)
{
Parcel data, reply;
data.writeInterfaceToken(ICameraService::getInterfaceDescriptor());
data.writeStrongBinder(cameraClient->asBinder());
data.writeInt32(cameraId);
data.writeString16(clientPackageName);
data.writeInt32(clientUid);
remote()->transact(BnCameraService::CONNECT, data, &reply);//通过binder远端调用传入的code为BnCameraservice::CONNECT
if (readExceptionCode(reply)) return -EPROTO;
status_t status = reply.readInt32();
if (reply.readInt32() != 0) {
device = interface_cast<ICamera>(reply.readStrongBinder());//转换为BpCamera
}
return status;
}接下来或执行到BnCameraService的onTransact()方法,主要就是switch_case,上面传入的是CONNECT
status_t BnCameraService::onTransact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
switch(code) {
......
case CONNECT: {
CHECK_INTERFACE(ICameraService, data, reply);
sp<ICameraClient> cameraClient =
interface_cast<ICameraClient>(data.readStrongBinder());
int32_t cameraId = data.readInt32();
const String16 clientName = data.readString16();
int32_t clientUid = data.readInt32();
sp<ICamera> camera;
status_t status = connect(cameraClient, cameraId,
clientName, clientUid, /*out*/camera);
//这里BnCameraService并没有实现connect函数,实际实现在CameraService中
reply->writeNoException();
reply->writeInt32(status);
if (camera != NULL) {
reply->writeInt32(1);
reply->writeStrongBinder(camera->asBinder());
} else {
reply->writeInt32(0);
}
return NO_ERROR;
} break;
......
}
}我们来看一下CameraService中的connect方法到底做了哪些事情
status_t CameraService::connect(
const sp<ICameraClient>& cameraClient,
int cameraId,
const String16& clientPackageName,
int clientUid,
/*out*/
sp<ICamera>& device) {
String8 clientName8(clientPackageName);
int callingPid = getCallingPid();
LOG1("CameraService::connect E (pid %d \"%s\", id %d)", callingPid,
clientName8.string(), cameraId);
//对当前连接请求合法性的判断
status_t status = validateConnect(cameraId, /*inout*/clientUid);
if (status != OK) {
return status;
}
//Client类继承BnCamera BasicClient
sp<Client> client;
{
Mutex::Autolock lock(mServiceLock);
sp<BasicClient> clientTmp;
//判断当前设备是否被占有或者是重复请求
if (!canConnectUnsafe(cameraId, clientPackageName,
cameraClient->asBinder(),
/*out*/clientTmp)) {
return -EBUSY;//从返回结果可以看出这个函数的用途
} else if (client.get() != NULL) {
device = static_cast<Client*>(clientTmp.get());
return OK;
}
//考虑当前没有其他程序占用摄像头,走到下一步
status = connectHelperLocked(/*out*/client,
cameraClient,
cameraId,
clientPackageName,
clientUid,
callingPid);
if (status != OK) {
return status;
}
}
// important: release the mutex here so the client can call back
// into the service from its destructor (can be at the end of the call)
//赋值给device作为传出参数
device = client;
return OK;
}继续跟踪到connectHelperLocked()函数中
status_t CameraService::connectHelperLocked(
/*out*/
sp<Client>& client,
/*in*/
const sp<ICameraClient>& cameraClient,
int cameraId,
const String16& clientPackageName,
int clientUid,
int callingPid,
int halVersion,
bool legacyMode) {
int facing = -1;
int deviceVersion = getDeviceVersion(cameraId, &facing);
if (halVersion < 0 || halVersion == deviceVersion) {
// Default path: HAL version is unspecified by caller, create CameraClient
// based on device version reported by the HAL.
switch(deviceVersion) {
case CAMERA_DEVICE_API_VERSION_1_0:
//创建CameraClient对象
client = new CameraClient(this, cameraClient,
clientPackageName, cameraId,
facing, callingPid, clientUid, getpid(), legacyMode);
break;
case CAMERA_DEVICE_API_VERSION_2_0:
case CAMERA_DEVICE_API_VERSION_2_1:
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
case CAMERA_DEVICE_API_VERSION_3_2:
client = new Camera2Client(this, cameraClient,
clientPackageName, cameraId,
facing, callingPid, clientUid, getpid(), legacyMode);
break;
case -1:
ALOGE("Invalid camera id %d", cameraId);
return BAD_VALUE;
default:
ALOGE("Unknown camera device HAL version: %d", deviceVersion);
return INVALID_OPERATION;
}
} else {
// A particular HAL version is requested by caller. Create CameraClient
// based on the requested HAL version.
if (deviceVersion > CAMERA_DEVICE_API_VERSION_1_0 &&
halVersion == CAMERA_DEVICE_API_VERSION_1_0) {
// Only support higher HAL version device opened as HAL1.0 device.
client = new CameraClient(this, cameraClient,
clientPackageName, cameraId,
facing, callingPid, clientUid, getpid(), legacyMode);
} else {
// Other combinations (e.g. HAL3.x open as HAL2.x) are not supported yet.
ALOGE("Invalid camera HAL version %x: HAL %x device can only be"
" opened as HAL %x device", halVersion, deviceVersion,
CAMERA_DEVICE_API_VERSION_1_0);
return INVALID_OPERATION;
}
}
//主要是对CameraClient的初始化过程
status_t status = connectFinishUnsafe(client, client->getRemote());
if (status != OK) {
// this is probably not recoverable.. maybe the client can try again
return status;
}
//保存CameraClient对象到本地数组中,以备CameraService使用
mClient[cameraId] = client;
LOG1("CameraService::connect X (id %d, this pid is %d)", cameraId,
getpid());
return OK;
}这里的client创建成功后会赋值给device,而device就是之前连接过程中的传入参数,到这里Camera的连接过程就基本完成了。
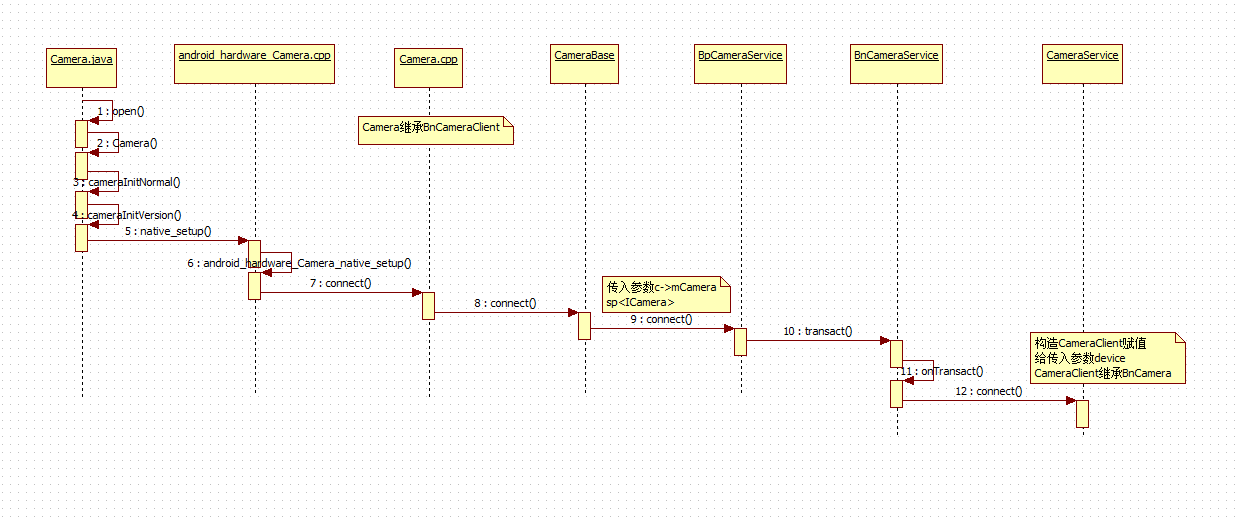
本文主要顺着代码理了一下过程,具体细节地方可能有所忽略。主要的流程图如下,欢迎交流指正。
备注
本文中代码使用的是Android5.0原始代码,最新的Android N版本除了把CameraService单独拎出来,其他的内容基本上大同小异。目前只关注API1,后续应该会补上API2的内容
版权声明:本文为博主原创文章,未经博主允许不得转载。
个人微信公众号,欢迎大家扫码关注,Android技术交流或者咨询。

