

本文是Ray Wenderlich上《ARKit by Tutorials》的读书笔记,主要讲内容概要和读后感
本文中,我们将通过一个Monster Truck小游戏的例子,学习SceneKit中的一些特殊的物理效果.你一定不知道:SceneKit中内置了正宗的车辆物理效果!

基本结构
共三部分:车身(Body),车轴(Axle),车轮(Wheel)

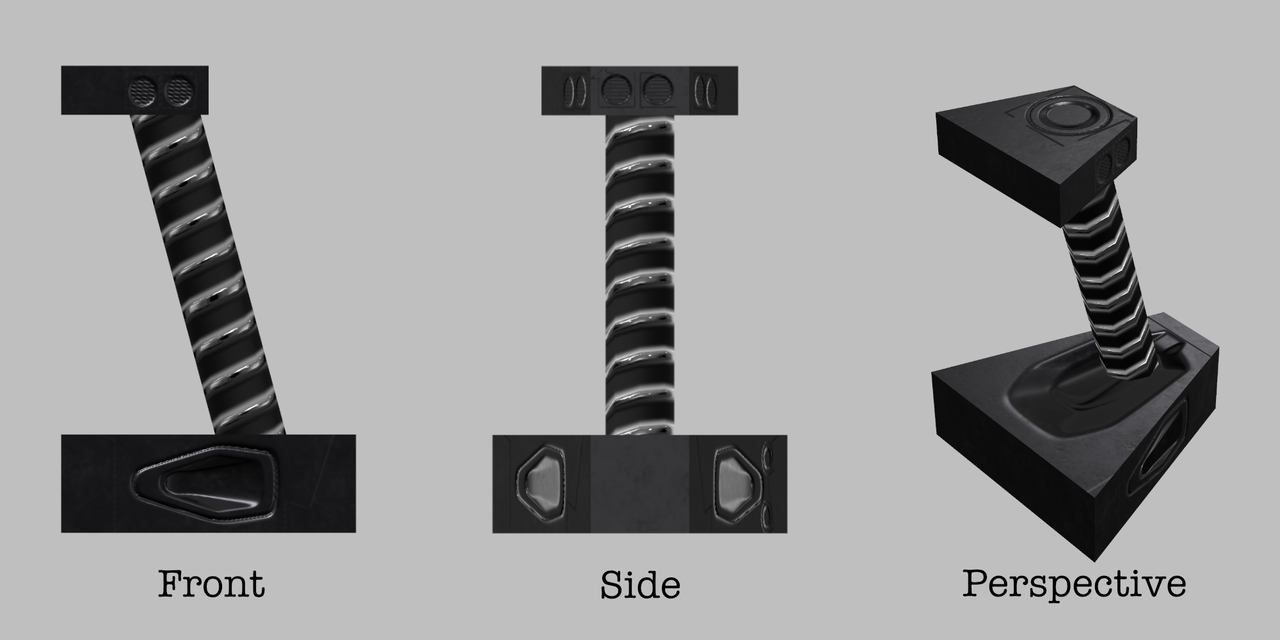
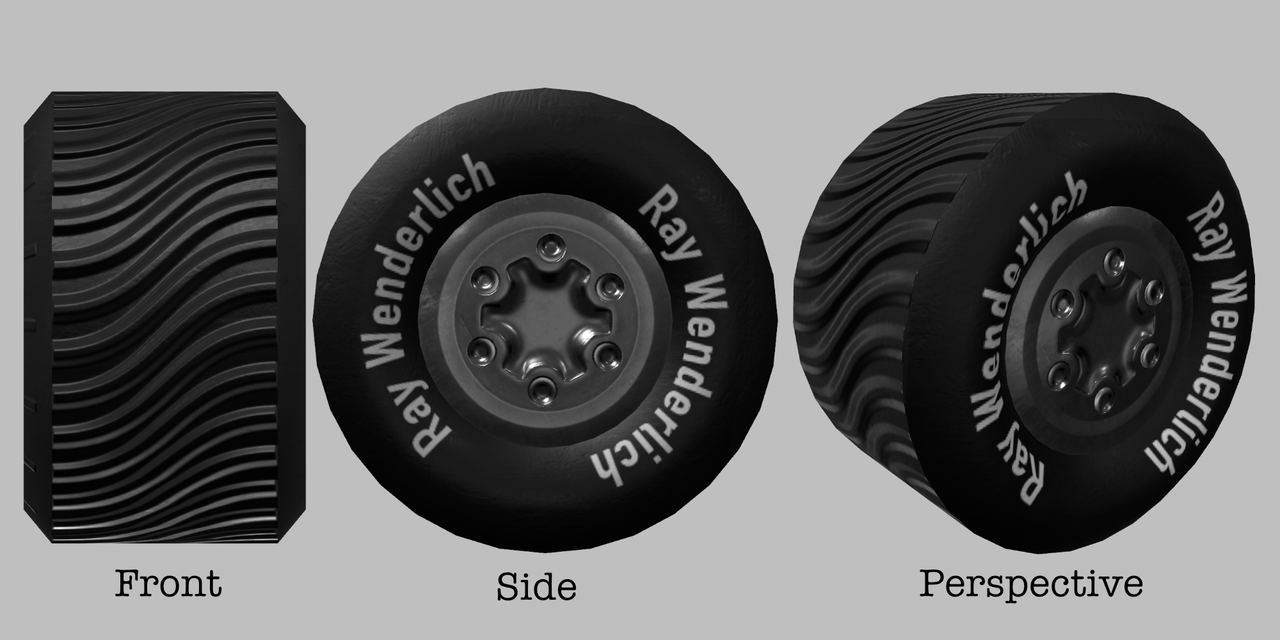

在SceneKit的编辑器中进行组装:
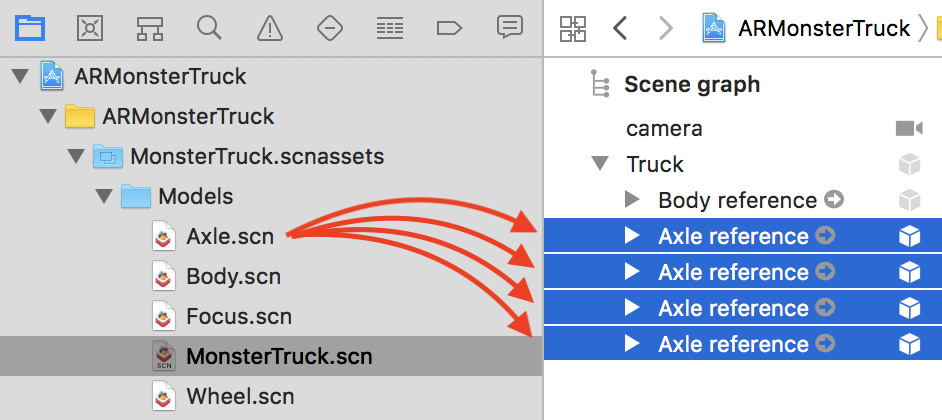
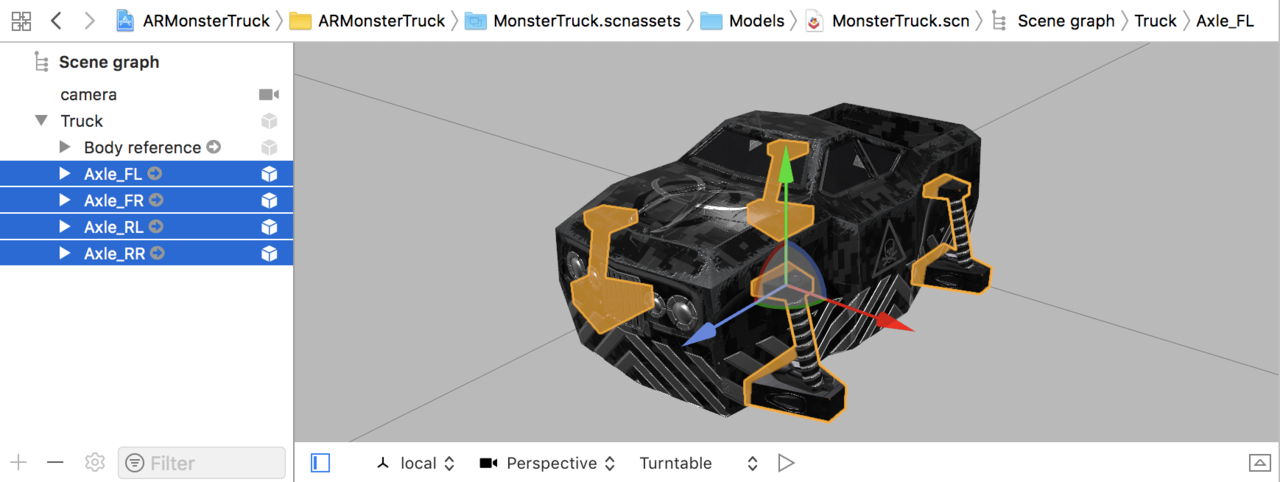
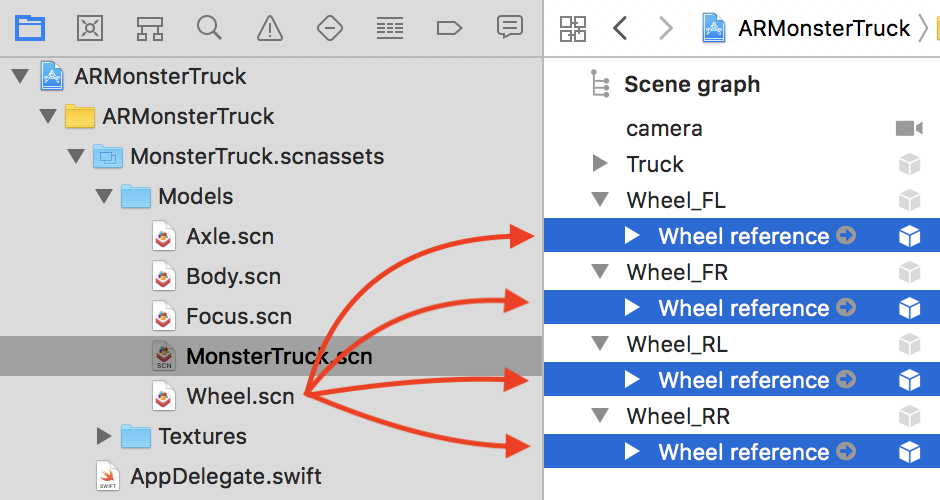
注意,车轮是通过一个轴来连接到真正的车轴(Axle)上的.
在代码中加载这些部件:
// 1
let truckScene = SCNScene(
named: "MonsterTruck.scnassets/Models/MonsterTruck.scn")!
truckNode = truckScene.rootNode.childNode(
withName: "Truck", recursively: true)
wheelFLNode = truckScene.rootNode.childNode(
withName: "Wheel_FL", recursively: true)
wheelFRNode = truckScene.rootNode.childNode(
withName: "Wheel_FR", recursively: true)
wheelRLNode = truckScene.rootNode.childNode(
withName: "Wheel_RL", recursively: true)
wheelRRNode = truckScene.rootNode.childNode(
withName: "Wheel_RR", recursively: true)
// 2
truckNode.addChildNode(wheelFLNode!)
truckNode.addChildNode(wheelFRNode!)
truckNode.addChildNode(wheelRLNode!)
truckNode.addChildNode(wheelRRNode!)
// 3
truckNode.isHidden = true
sceneView.scene.rootNode.addChildNode(truckNode)
添加车辆物理效果
SceneKit中有专用的物理效果:
- SCNPhysicsVehicle:让一个标准的物理形体表现的像一辆车.
- SCNPhysicsBody:正常情况下的标准物理形体.用在车身类物体上.这类形体在创建过程中将会是
SCNPhysicsVehicle类型的. - SCNPhysicsVehicleWheel:专用的物理形体,不仅模拟车轮的行为,还有外观及其他物理特性.这类形体在创建过程中将会是
SCNPhysicsVehicle类型的.
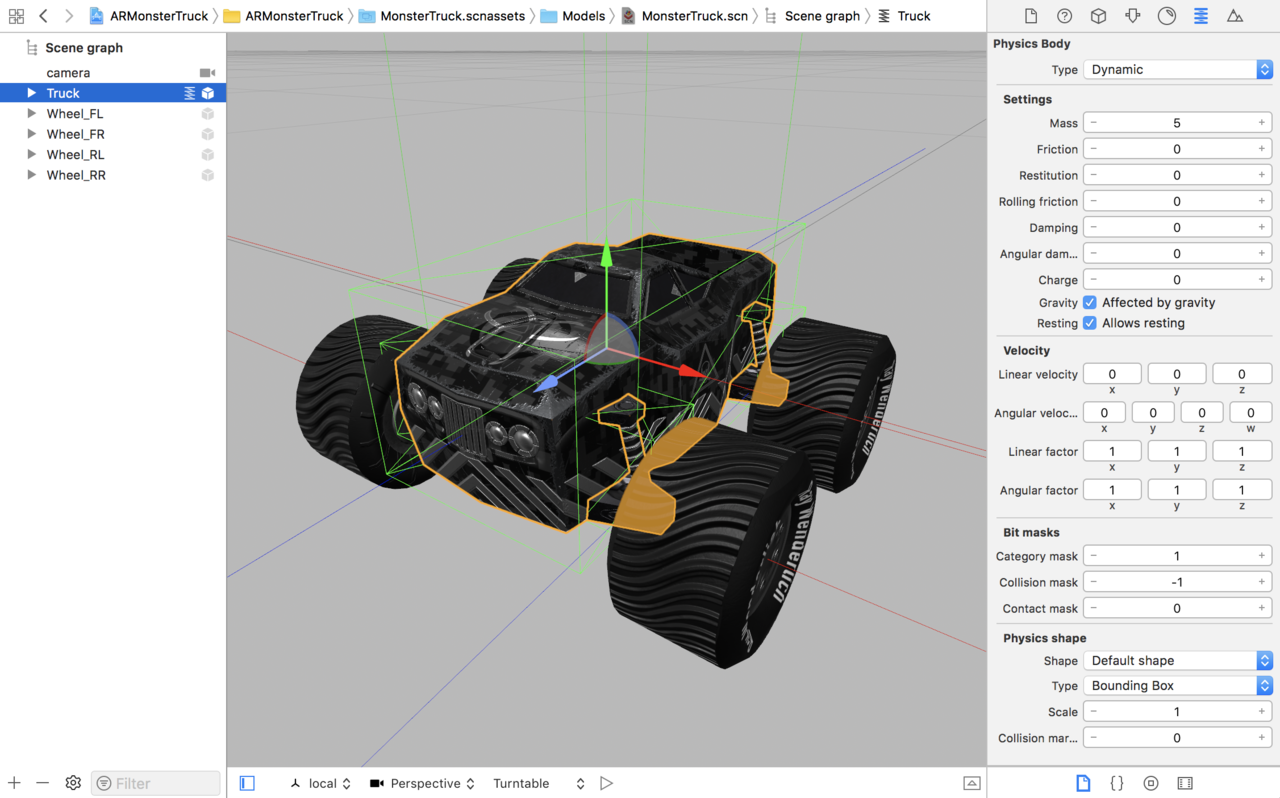
选中Truch节点,做如下图设置:
创建车轮物理效果
定义一些常量,交赋值给SCNPhysicsVehicleWheel节点.
let wheelRadius: CGFloat = 0.04
let wheelFrictionSlip: CGFloat = 0.9
let suspensionMaxTravel: CGFloat = 4.0
let suspensionMaxForce: CGFloat = 100
let suspensionRestLength: CGFloat = 0.08
let suspensionDamping: CGFloat = 2.0
let suspensionStiffness: CGFloat = 2.0
let suspensionCompression: CGFloat = 4.0
func createPhysicsVehicleWheel(wheelNode: SCNNode,
position: SCNVector3) -> SCNPhysicsVehicleWheel {
let wheel = SCNPhysicsVehicleWheel(node: wheelNode)
wheel.connectionPosition = position
wheel.axle = SCNVector3(x: -1.0, y: 0, z: 0)
wheel.maximumSuspensionTravel = suspensionMaxTravel
wheel.maximumSuspensionForce = suspensionMaxForce
wheel.suspensionRestLength = suspensionRestLength
wheel.suspensionDamping = suspensionDamping
wheel.suspensionStiffness = suspensionStiffness
wheel.suspensionCompression = suspensionCompression
wheel.radius = wheelRadius
wheel.frictionSlip = wheelFrictionSlip
return wheel
}
各个常量的含义:
- Wheel Radius(车轮半径):车轮物理外观的实际半径.
- Wheel Friction Slip(车轮摩擦滑动): 指定车轮自身和接触表面的摩擦力(个人理解就是最大静摩擦力,超过后会打滑).
- Suspension Maximum Travel(悬架最大行程): 定义了车轮允许沿连接点上下移动的最大行程.单位是厘米.
- Suspension Maximum Force(悬架最大受力): 定义悬架受到的车轮和车身的最大受力.单位是牛顿.
- Suspension Rest Length(悬架静息长度): 定义悬架在静止不动时的长度.单位是米.
- Suspension Damping(悬架阻尼): 定义了悬架在振荡中的阻尼系数.
- Suspension Stiffness(悬架刚度). 定义了车轮自身和车辆底盘之间的弹簧系数.
- Suspension Compression(悬架压缩回弹): 定义了悬架在受到压缩后,回到静息状态的速度.
全车的物理效果
将车轮绑定在车身上,并使用物理效果:
func createVehiclePhysics() {
// 1
if physicsVehicle != nil {
sceneView.scene.physicsWorld.removeBehavior(physicsVehicle)
}
//2
let wheelFL = createPhysicsVehicleWheel(
wheelNode: wheelFLNode!,
position: SCNVector3(x: -0.07, y: 0.04, z: 0.06))
let wheelFR = createPhysicsVehicleWheel(
wheelNode: wheelFRNode!,
position: SCNVector3(x: 0.07, y: 0.04, z: 0.06))
let wheelRL = createPhysicsVehicleWheel(
wheelNode: wheelRLNode!,
position: SCNVector3(x: -0.07, y: 0.04, z: -0.06))
let wheelRR = createPhysicsVehicleWheel(
wheelNode: wheelRRNode!,
position: SCNVector3(x: 0.07, y: 0.04, z: -0.06))
// 3
physicsVehicle = SCNPhysicsVehicle(
chassisBody: truckNode.physicsBody!,
wheels: [wheelFL, wheelFR, wheelRL, wheelRR])
// 4
sceneView.scene.physicsWorld.addBehavior(physicsVehicle)
}
初始化时放置的位置,将车辆放在聚焦框focusNode的上面:
func updatePositions() {
// 1
self.truckNode.position = self.focusNode.position
self.truckNode.position.y += 0.20
// 2
self.truckNode.physicsBody?.velocity = SCNVector3Zero
self.truckNode.physicsBody?.angularVelocity = SCNVector4Zero
// 3
self.truckNode.physicsBody?.resetTransform()
}
此外,还有添加地面,设置游戏状态等.

添加引擎的力
我们想让用户点击屏幕时,加速前进,松开后缓慢减速
var maximumSpeed: CGFloat = 2.0
var isThrottling = false
var engineForce: CGFloat = 0
let defaultEngineForce: CGFloat = 10.0
var brakingForce: CGFloat = 0
let defaultBrakingForce: CGFloat = 0.01
override func touchesBegan(_ touches: Set<UITouch>,
with event: UIEvent?) {
isThrottling = true
}
override func touchesEnded(_ touches: Set<UITouch>,
with event: UIEvent?) {
isThrottling = false
}
func renderer(_ renderer: SCNSceneRenderer, updateAtTime time: TimeInterval) {
DispatchQueue.main.async {
self.updateStatus()
self.updateFocusNode()
self.updateVehiclePhysics()
}
}
func updateVehiclePhysics() {
// 1
guard self.gameState == .playGame else { return }
// 2
if isThrottling {
engineForce = defaultEngineForce
brakingForce = 0
} else {
engineForce = 0
brakingForce = defaultBrakingForce
}
// 3 apply方法是SCNPhysicsVehicle自带的方法
physicsVehicle.applyEngineForce(engineForce, forWheelAt: 0)
physicsVehicle.applyEngineForce(engineForce, forWheelAt: 1)
physicsVehicle.applyEngineForce(engineForce, forWheelAt: 2)
physicsVehicle.applyEngineForce(engineForce, forWheelAt: 3)
physicsVehicle.applyBrakingForce(brakingForce, forWheelAt: 0)
physicsVehicle.applyBrakingForce(brakingForce, forWheelAt: 1)
physicsVehicle.applyBrakingForce(brakingForce, forWheelAt: 2)
physicsVehicle.applyBrakingForce(brakingForce, forWheelAt: 3)
// Limit Speed
if self.physicsVehicle.speedInKilometersPerHour >
CGFloat(maximumSpeed) {
engineForce = CGFloat(0.0)
}
}
控制方向
可以用CoreMotion框架来控制车辆方向.
let motionManager = CMMotionManager()
let steeringClamp: CGFloat = 0.6
var steeringAngle: CGFloat = 0
func updateSteeringAngle(acceleration: CMAcceleration) {
steeringAngle = (CGFloat)(acceleration.y)
if steeringAngle < -steeringClamp {
steeringAngle = -steeringClamp;
} else if steeringAngle > steeringClamp {
steeringAngle = steeringClamp;
}
}
func startAccelerometer() {
// 1
guard motionManager.isAccelerometerAvailable else { return }
// 2
motionManager.accelerometerUpdateInterval = 1/60.0
// 3
motionManager.startAccelerometerUpdates(
to: OperationQueue.main,
withHandler: { (accelerometerData: CMAccelerometerData?,
error: Error?) in
self.updateSteeringAngle(acceleration:
accelerometerData!.acceleration)
})
}
func stopAccelerometer() {
motionManager.stopAccelerometerUpdates()
}
此外,还要在updateVehiclePhysics()方法中添加,才能使用,这也是系统自带的处理车辆转向的方法:
physicsVehicle.setSteeringAngle(steeringAngle, forWheelAt: 0)
physicsVehicle.setSteeringAngle(steeringAngle, forWheelAt: 1)

第五部分读书笔记结束!请期待第二版的读书笔记。
ARKit是在WWDC2017上推出的,2018春季更新了ARKit 1.5版本.《ARKit by Tutorials》第一版写作完成时,WWDC2018还未召开,因此第一版书中内容较为简单,也没有涉及到ARKit 2.0的新特性:世界地图,图片追踪,3D物体检测等.
后续第二版更新已在2018年秋季发布,新增了两章ARKit 2.0的Demo及讲解,我会持续更新该读书笔记系列.
