

注:旋转中心很重要 坐标系为像素,按照像素位置(第(m,n)做为坐标)
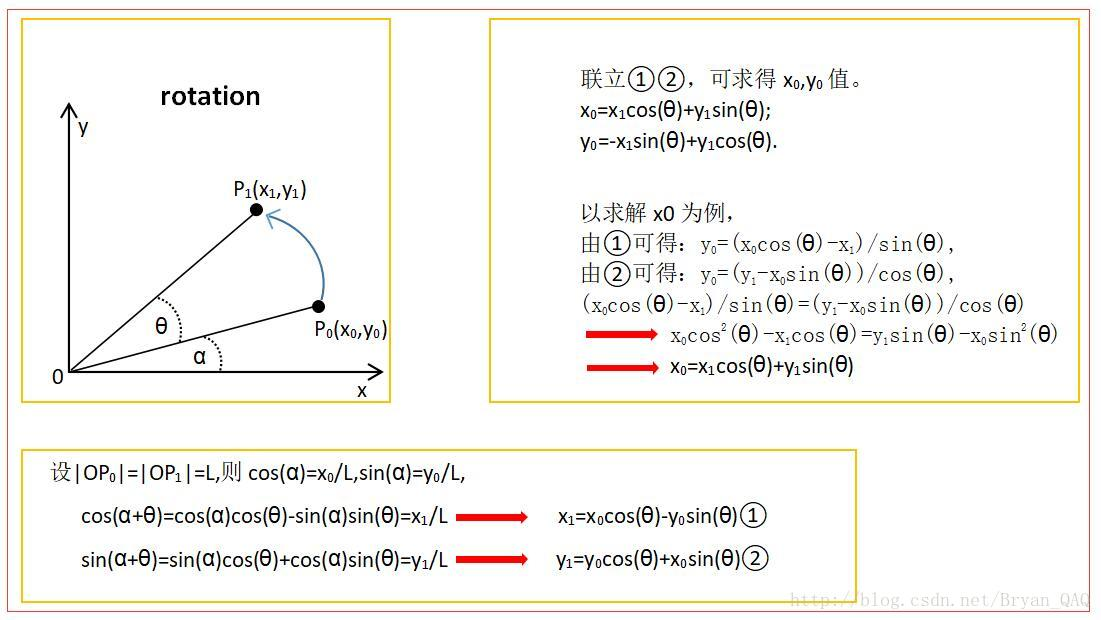
以坐标原点为中心旋转的原理:
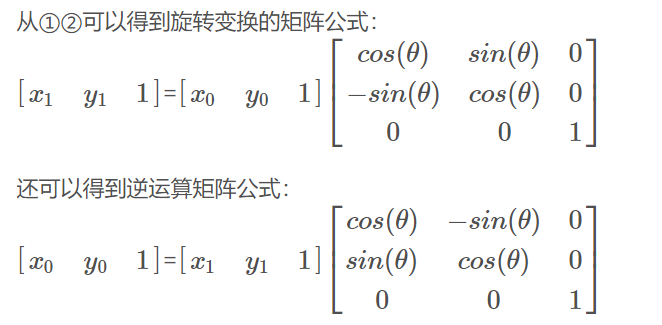
点p0绕坐标原点逆时针方向旋转θ角度得到点p1.
以任意图形中心点为坐标原点旋转原理:
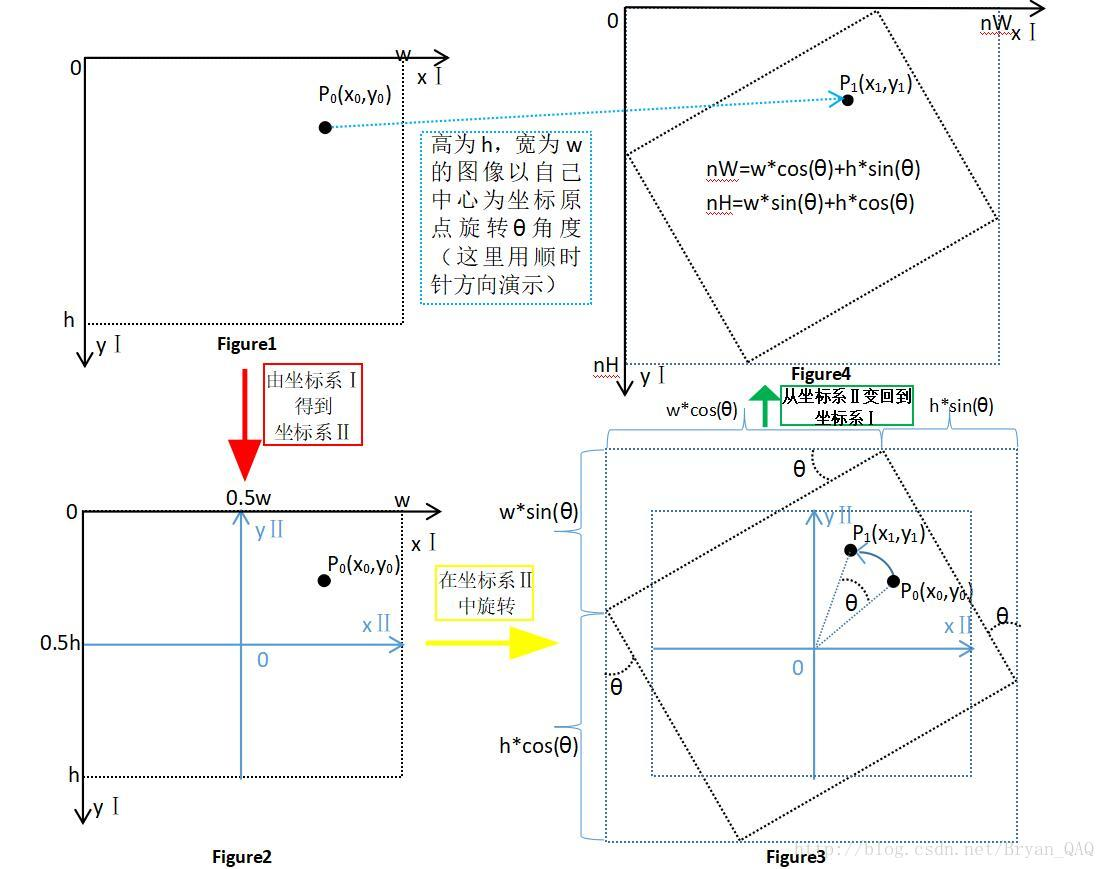
(1)将坐标系Ⅰ变成坐标系Ⅱ
(2)在坐标系Ⅱ中旋转θ角
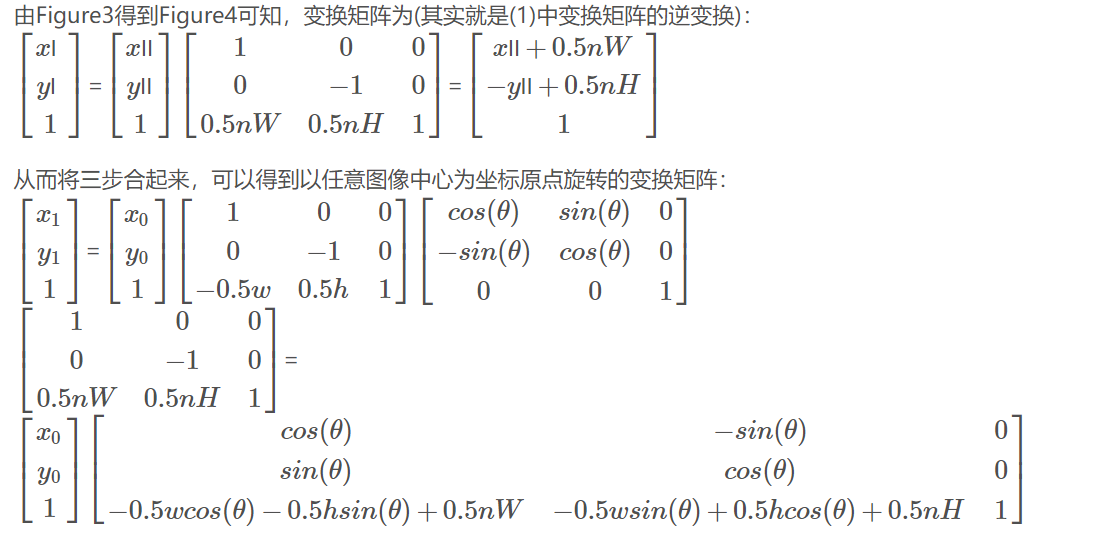
(3)将坐标系Ⅱ变成坐标系Ⅰ
(1)将坐标系Ⅰ变成坐标系Ⅱ
由Figure1得到Figure2可知,变换矩阵为:
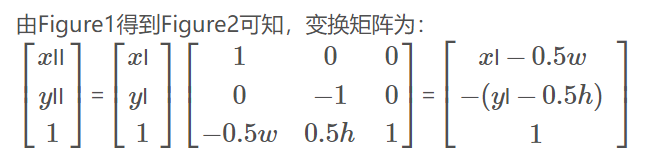
见上面以坐标原点为中心旋转的原理
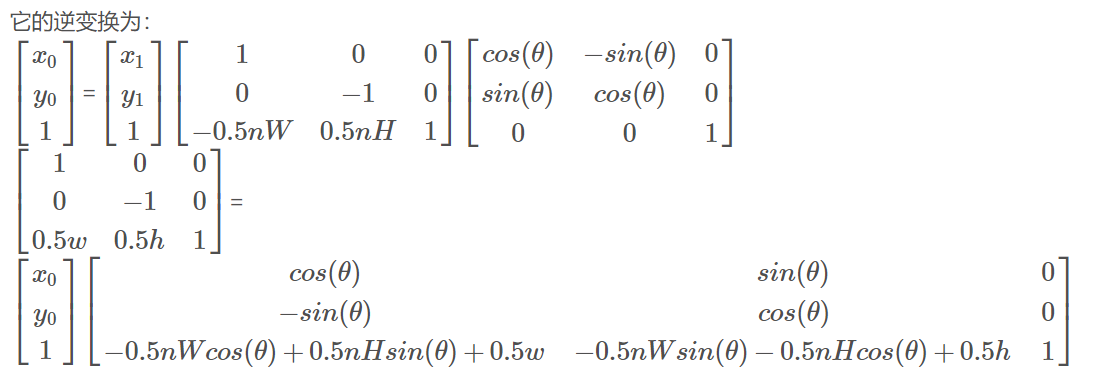
(3)将坐标系Ⅱ变成坐标系Ⅰ
最近邻插值matlab代码
function [ A ] = myimrotate(B,degree,method) %定义旋转函数,degree为要旋转的角度
[r,c,d]=size(B); %获取输入图像B的行r、列c和通道数d,为了旋转彩色图像所以有必要得到通道数d
nH=round(r*abs(cosd(degree))+c*abs(sind(degree))); %旋转图像后得到的新高度,“round()函数四舍五入“
nW=round(c*abs(cosd(degree))+r*abs(sind(degree))); %旋转图像后得到的新宽度
A=zeros(nH,nW,d); %定义生成目标图像的行列以及通道数
M1=[1 0 0;
0 -1 0;
-0.5*nW 0.5*nH 1 ]; %坐标系变换矩阵M1
M2=[cosd(degree) -sind(degree) 0;
sind(degree) cosd(degree) 0;
0 0 1]; %角度旋转变换矩阵M2,我用的是顺时针方向
M3=[1 0 0;
0 -1 0;
0.5*c 0.5*r 1]; %坐标系变换矩阵M3
for i=1:nW
for j=1:nH
temp=[i j 1]*M1*M2*M3; %得到旋转后的矩阵temp
y_r=temp(1,2); %y取矩阵temp的第一行第二列,y对应j,为高度
x_r=temp(1,1); %x取矩阵temp的第一行第一列,x对应i,为宽度
y=round(y_r); %y四舍五入取整
x=round(x_r); %x四舍五入取整
if(x>=1&&x<=c)&&(y>=1&&y<=r) %判断的得到的(x,y)点是否在原图像上
%最近邻插值
if strcmp(method,'near')
A(j,i,:)=B(y,x,:); %将原图像的像素点赋值给对应的旋转后图像上的点
end %(”有人疑惑为啥不是A(i,j,:)=B(x,y,:);因为i,x对应的是列,即宽,而j,y对应的是行,即高“),我这里以x为横坐标,y为竖向纵坐标
%线性插值
if strcmp(method,'linear')
b = x_r-x;
a = y+1-y_r;
if(x>=1&&x+1<=c)&&(y>=1&&y+1<=r)
P1 = b*B(y, x) + (1-b)*B(y+1, x);
P2 = b*B(y, x+1) + (1-b)*B(y+1, x+1);
P = a*P1 + (1-a)*P2;
else
P=B(y,x,:);
end
A(j,i,:)=P;
end
%三次插值
if strcmp(method,'trib')
x = floor(x_r);
y = floor(y_r);
if(x>1&&x+2<=c)&&(y>1&&y+2<=r)
b = x_r-x;
a = y_r-y;
A_A=[s(1+a) s(a) s(1-a) s(2-a)];
C=[s(1+b);s(b);s(1-b);s(2-b)];
B_B=[B(y-1,x-1) B(y-1,x) B(y-1,x+1) B(y-1,x+2)
B(y,x-1) B(y,x) B(y,x+1) B(y,x+2)
B(y+1,x-1) B(y+1,x) B(y+1,x+1) B(y+1,x+2)
B(y+2,x-1) B(y+2,x) B(y+2,x+1) B(y+2,x+2)];
A(j,i,:) = (double(A_A)*double(B_B)*double(C));
% else
% if x<1
% x = x+1;
% end
% if y<1
% y = y+1;
% end
% A(j,i,:)=B(y,x,:);
end
end
end
end
end
end
%计算S值
function [ re ] = s(x)
x = abs(x);
if x<1 && x>=0
re = 1-2*x^2 + x^3;
end
if x>=1 &&x<2
re = 4 - 8*x +5*x^2-x^3;
end
if x>=2
re = 0;
end
end
