

- 原文地址:Optimal Control: LQR
- 原文作者:Marin Vlastelica Pogančić
- 译文出自:掘金翻译计划
- 本文永久链接:github.com/xitu/gold-m…
- 译者:EmilyQiRabbit
- 校对者:ezioyuan,TUARAN

一份关于 LQR 的简单易懂的入门级教程,它是最优控制的基础概念。
我将会在这篇文章中讨论最优控制,并会更具体的讨论性能非常优秀的线性二次调节器。在最优控制领域中,它的使用频率非常高,并且还指明了最优控制和最近很火的强化学习之间的相似之处。它们两者都用来解决顺序决策过程中相似的问题,但有趣的是命名却不同。话虽如此,但是还是小小警告一下读者,接下来可能会涉及一些数学问题:
这篇文章包括一些线性代数和微积分的运算,但是不用怕,它们很简单,你没问题的。
闲言少叙,现在我们开始吧。首先我们先来给出最优控制问题的一般定义,或者最好说是优化问题。它其实就意味着最大化或者最小化某些受到特定变量约束的函数。一个典型的最优控制问题函数如下所示:
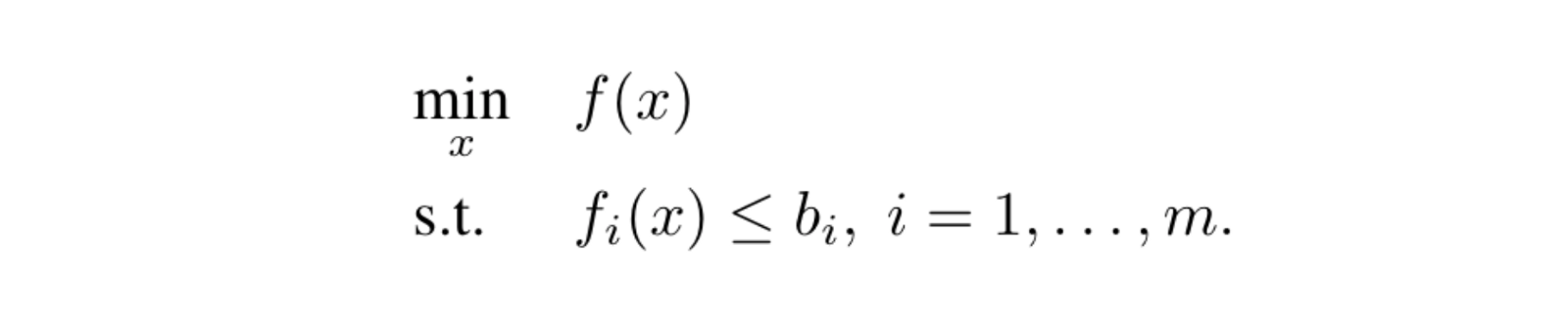
这个函数非常直白简单,就是最小化受到某些约束的函数 f(s.t. 是约束条件的缩写)。在优化领域中,基于目标函数和约束条件,难度也会随之变动。而基于实际的问题,当然约束条件也会保持相同或有所变化。不用多说,优化问题中的非凸函数是更难优化的,但如果是凸函数,我们就能高效快速地解决。无论如何,凸函数相当重要,所以当你在解决的问题中找出它的时候,你的反应差不多是这样子的:

在控制问题中,我们通过优化轨迹来最小化代价函数或者最大化回报函数,这和强化学习的处理方式是一样的。自然而然地,条件也是动态变化的,即给出我们下一状态的函数是基于当前的行为和状态的,也是优化约束的一部分。所以我们可以像这样描述控制优化问题:
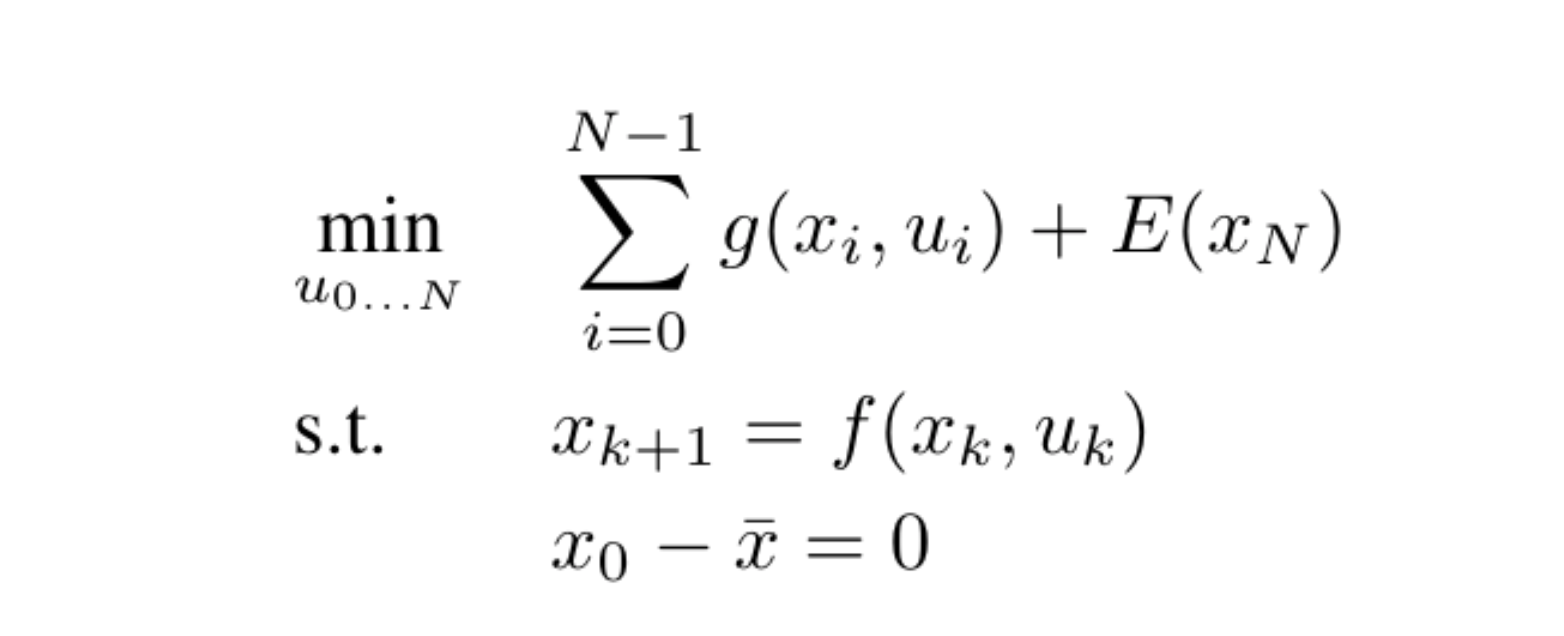
这是一个到 N 的有限集合的例子。让我们来分块解析一下。x 是每个时间点的状态变量。u 是行为函数。E 是最终状态的最终代价,g 是每对状态-行为函数的代价函数。带横线的 x 是我们想要开始优化的初始状态,f 则是动态函数。在这个例子中,没有不等式约束。事实证明,如果 f 函数是一个关于 x 和 u 的线性函数,并且 g 函数是 x 和 u 的二次函数,那么这个问题将变得容易很多。于是我们得出了线性二次调节问题的定义:
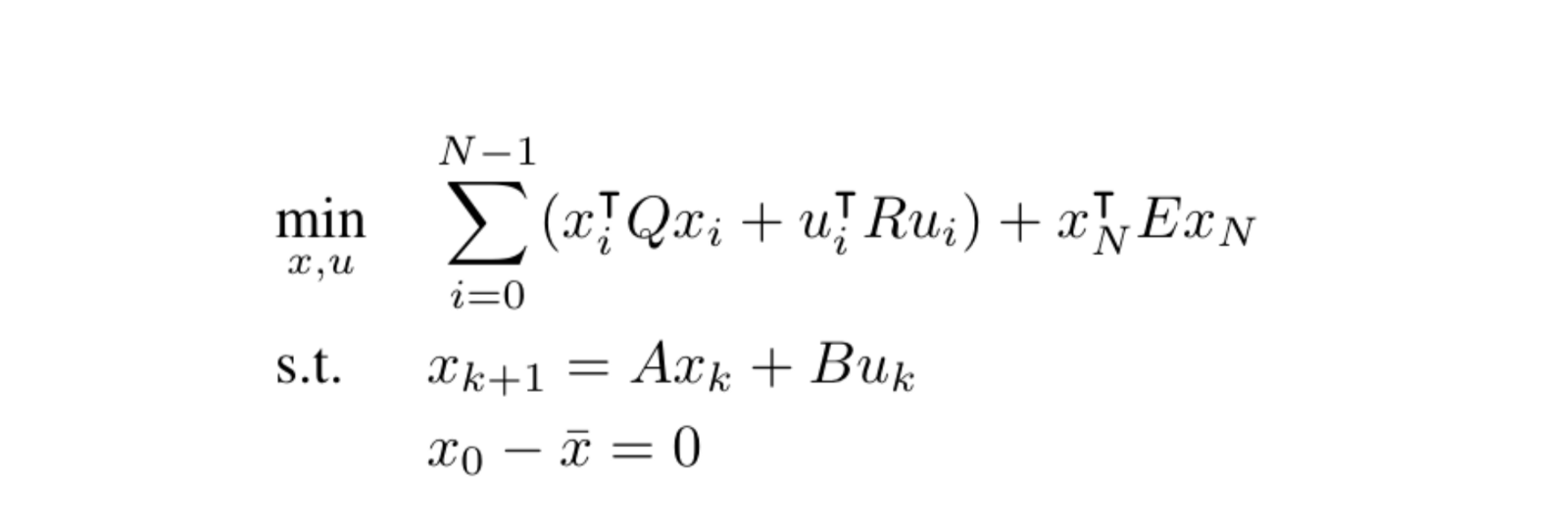
在这几个式子中,Q、R 和 E 是代价矩阵,它们决定了多项式系数。我们也可以用矩阵的形式写出每一个时间点的代价,使得表达式更加简单。
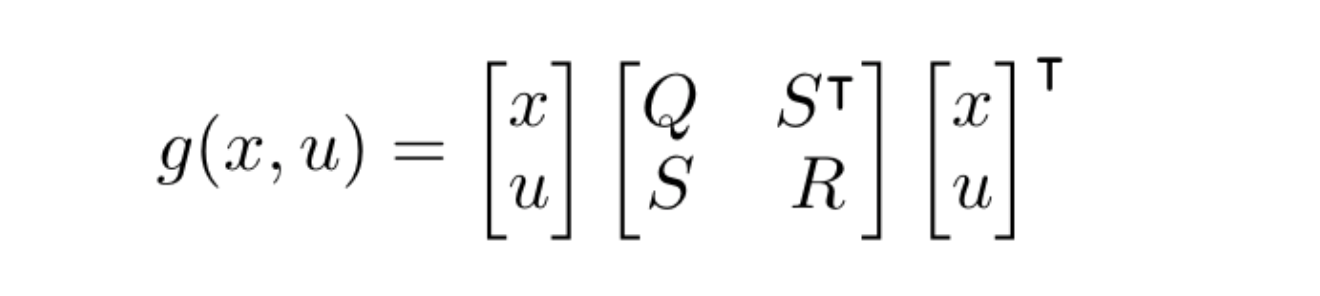
在上面这个例子中,我们忽略了 S,或者更确切的说我们假设 S = 0,但这不会显著改变数学运算的结果,S 也可以是代价函数中影响 x 和 u 的关系的某个矩阵。
接下来我们将要应用最优原则,它陈述了一个理所当然的事实,即如果在 A 和 C 之间存在一条最优路径,然后我们在这条路径上取一点 B,那么从 A 到 B 的子路径也是最优路径。这真的是凭直觉就能得出的事实。基于此,我们可以定义最优代价函数,或者说是递归路径总代价。由此我们得出哈密顿-雅可比-贝尔曼方程:

J* 函数是最优代价函数。在本例中,我们将目标函数声明为多项式函数,所以逻辑上我们可以假设最优代价函数也是多项式函数,于是我们就可以这样写:
并且最终的代价函数在逻辑上也基于最优问题的定义,如下所示:
现在,如果我们将函数 g 的定义以及动态条件变量插入到贝尔曼等式中,我们就能得出:

基于二次代价假设,我们该如何得出这个函数的最小值呢?很简单,我们取 u 的梯度并让其等于 0,将所有的变量放到一个大的中心矩阵中去:

为了看上去比较简单,我们用如下的矩阵代替(这是不言自明的):
将每一项都相乘,由于我们是要对 u 求导,所以只需要关注含有 u 的项,于是可以得出如下的中间结果:

在计算出梯度并重新排列后,我们得出了 u*,它可以最小化代价,即最优行为函数:
也许现在你可以先停下来想一想。这个式子意味这什么?它意味着对于最优行为函数,我们有了一个封闭形式的解答。这个答案非常干净利落。那么接下来我们还需要做什么来解析它呢?我们还需要 k+1 时间点的矩阵 P。基于下面的等式,我们可以从最后一个时间点递归计算:

这就是广为人知的代数 Riccati 等式。在某些情况下,我们想要某个固定时间点的解决方案,对于无限时间,方程可以求解出一个固定的 P。在这种情况下,我们甚至不需要递归。我们可以直接获取到最优反馈控制的答案。
基本上这就是本篇文章的所有内容了。你一定在赞赏 LQR 的能力了。当然,很多问题并不能简化为线性动态问题,但是如果我们能够简化,我们能得出的解答是让人非常惊喜的。这种方法甚至被应用于动态函数是非线性的情况下,这时候我们就用泰勒扩展将其转化为线性问题。这是复杂的轨迹优化问题中经常使用的方法,被称为差分动态规划(DDP),一个例子就是 iLQR(迭代 LQR),读者可以自行查阅。
现在你已经学到了 LQR 功夫,那么你就得到了理解最优控制的工具。
我希望这样解释 LQR 能够让你理解。它是一个非常简单但是非常有用的概念,也是很多最优控制算法的基石。
如果发现译文存在错误或其他需要改进的地方,欢迎到 掘金翻译计划 对译文进行修改并 PR,也可获得相应奖励积分。文章开头的 本文永久链接 即为本文在 GitHub 上的 MarkDown 链接。
掘金翻译计划 是一个翻译优质互联网技术文章的社区,文章来源为 掘金 上的英文分享文章。内容覆盖 Android、iOS、前端、后端、区块链、产品、设计、人工智能等领域,想要查看更多优质译文请持续关注 掘金翻译计划、官方微博、知乎专栏。
