

在使用map的过程中,有两个问题是经常会遇到的:读写冲突和遍历无序性。为什么会这样呢,底层是怎么实现的呢?带着这两个问题,我简单的了解了一下map的增删改查及遍历的实现。
结构
hmap
type hmap struct {
// Note: the format of the hmap is also encoded in cmd/compile/internal/gc/reflect.go.
// Make sure this stays in sync with the compiler's definition.
count int // 有效数据的长度# live cells == size of map. Must be first (used by len() builtin)
flags uint8 // 用于记录hashmap的状态
B uint8 // 2^B = buckets的数量log_2 of # of buckets (can hold up to loadFactor * 2^B items)
noverflow uint16 // approximate number of overflow buckets; see incrnoverflow for details
hash0 uint32 // 随机的hash种子
buckets unsafe.Pointer // buckets数组array of 2^B Buckets. may be nil if count==0.
oldbuckets unsafe.Pointer // 老的buctedts数据,map增长的时候会用到
nevacuate uintptr // progress counter for evacuation (buckets less than this have been evacuated)
extra *mapextra // 额外的bmap数组optional fields
}
mapextra
type mapextra struct {
// If both key and value do not contain pointers and are inline, then we mark bucket
// type as containing no pointers. This avoids scanning such maps.
// However, bmap.overflow is a pointer. In order to keep overflow buckets
// alive, we store pointers to all overflow buckets in hmap.extra.overflow and hmap.extra.oldoverflow.
// overflow and oldoverflow are only used if key and value do not contain pointers.
// overflow contains overflow buckets for hmap.buckets.
// oldoverflow contains overflow buckets for hmap.oldbuckets.
// The indirection allows to store a pointer to the slice in hiter.
overflow *[]*bmap
oldoverflow *[]*bmap
// nextOverflow holds a pointer to a free overflow bucket.
nextOverflow *bmap
}
bmap
type bmap struct {
// tophash generally contains the top byte of the hash value
// for each key in this bucket. If tophash[0] < minTopHash,
// tophash[0] is a bucket evacuation state instead.
tophash [bucketCnt]uint8
// Followed by bucketCnt keys and then bucketCnt values.
// NOTE: packing all the keys together and then all the values together makes the
// code a bit more complicated than alternating key/value/key/value/... but it allows
// us to eliminate padding which would be needed for, e.g., map[int64]int8.
// Followed by an overflow pointer.
}
stringStruct
type stringStruct struct {
str unsafe.Pointer
len int
}
hiter
map遍历时用到的结构,startBucket+offset设定了开始遍历的地址,保证map遍历的无序性
type hiter struct {
// key的指针
key unsafe.Pointer // Must be in first position. Write nil to indicate iteration end (see cmd/internal/gc/range.go).
// 当前value的指针
value unsafe.Pointer // Must be in second position (see cmd/internal/gc/range.go).
t *maptype
// 指向map的指针
h *hmap
// 指向buckets的指针
buckets unsafe.Pointer // bucket ptr at hash_iter initialization time
// 指向当前遍历的bucket的指针
bptr *bmap // current bucket
// 指向map.extra.overflow
overflow *[]*bmap // keeps overflow buckets of hmap.buckets alive
// 指向map.extra.oldoverflow
oldoverflow *[]*bmap // keeps overflow buckets of hmap.oldbuckets alive
// 开始遍历的bucket的索引
startBucket uintptr // bucket iteration started at
// 开始遍历bucket上的偏移量
offset uint8 // intra-bucket offset to start from during iteration (should be big enough to hold bucketCnt-1)
wrapped bool // already wrapped around from end of bucket array to beginning
B uint8
i uint8
bucket uintptr
checkBucket uintptr
}
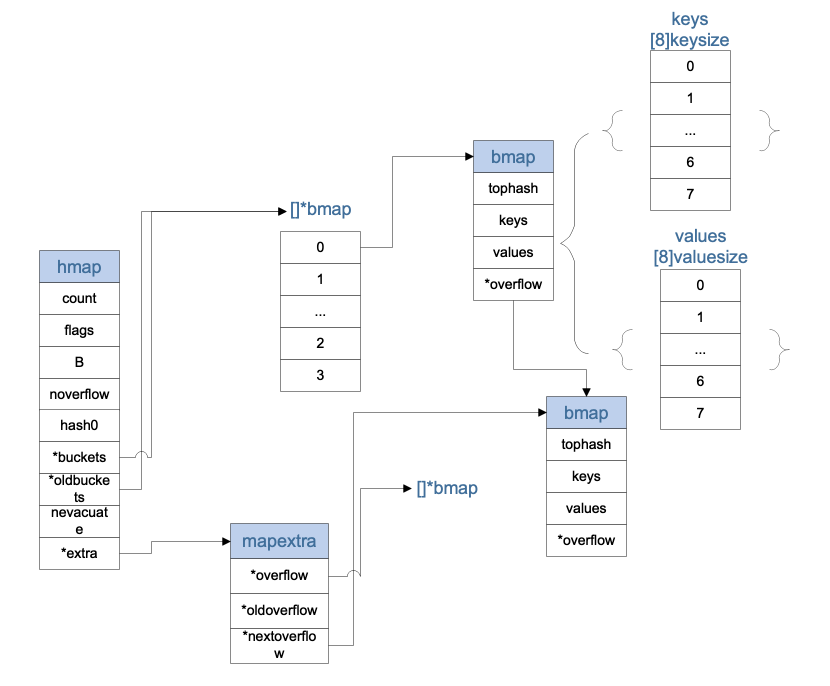
这里的keys和values、*overflow三个变量在结构体中并没有体现,但是在源码过程中,一直有为他们预留位置,所以这里的示意图中就展示出来了,keys和values其实8个长度的数组
demo
我们简单写个demo,通过go tool 来分析一下底层所对应的函数
func main() {
m := make(map[interface{}]interface{}, 16)
m["111"] = 1
m["222"] = 2
m["444"] = 4
_ = m["444"]
_, _ = m["444"]
delete(m, "444")
for range m {
}
}
▶ go tool objdump -s "main.main" main | grep CALL
main.go:4 0x455c74 e8f761fbff CALL runtime.makemap(SB)
main.go:5 0x455ce1 e8da6dfbff CALL runtime.mapassign(SB)
main.go:6 0x455d7b e8406dfbff CALL runtime.mapassign(SB)
main.go:7 0x455e15 e8a66cfbff CALL runtime.mapassign(SB)
main.go:8 0x455e88 e89363fbff CALL runtime.mapaccess1(SB)
main.go:9 0x455ec4 e84766fbff CALL runtime.mapaccess2(SB)
main.go:10 0x455f00 e85b72fbff CALL runtime.mapdelete(SB)
main.go:12 0x455f28 e804a7ffff CALL 0x450631
main.go:12 0x455f53 e8b875fbff CALL runtime.mapiterinit(SB)
main.go:12 0x455f75 e88677fbff CALL runtime.mapiternext(SB)
main.go:7 0x455f8f e81c9cffff CALL runtime.gcWriteBarrier(SB)
main.go:6 0x455f9c e80f9cffff CALL runtime.gcWriteBarrier(SB)
main.go:5 0x455fa9 e8029cffff CALL runtime.gcWriteBarrier(SB)
main.go:3 0x455fb3 e8f87dffff CALL runtime.morestack_noctxt(SB)
初始化
makemap
makemap创建一个hmap结构体,并赋予这个变量一些初始的属性
func makemap(t *maptype, hint int, h *hmap) *hmap {
// 首先判断map的大小是否合适
if hint < 0 || hint > int(maxSliceCap(t.bucket.size)) {
hint = 0
}
// initialize Hmap
// 初始化hmap结构
if h == nil {
h = new(hmap)
}
// 生成一个随机的hash种子
h.hash0 = fastrand()
// find size parameter which will hold the requested # of elements
// 根据hint,也就是map预设的长度,确定B的大小,以使map的装载系数在正常范围内,扩容那块再细讲
B := uint8(0)
for overLoadFactor(hint, B) {
B++
}
h.B = B
// allocate initial hash table
// if B == 0, the buckets field is allocated lazily later (in mapassign)
// If hint is large zeroing this memory could take a while.
// 如果B==0,则赋值的时候进行惰性分配,如果B!=0,则分配对应数量的buckets
if h.B != 0 {
var nextOverflow *bmap
h.buckets, nextOverflow = makeBucketArray(t, h.B, nil)
if nextOverflow != nil {
h.extra = new(mapextra)
h.extra.nextOverflow = nextOverflow
}
}
return h
}
##makeBucketArray
makeBucketArray初始化了map所需的buckets,最少分配2^b个buckets
func makeBucketArray(t *maptype, b uint8, dirtyalloc unsafe.Pointer) (buckets unsafe.Pointer, nextOverflow *bmap) {
base := bucketShift(b)
nbuckets := base
// 如果b,也就是map比较大的情况,则多分配点数组,给nextOverflow使用
if b >= 4 {
// 计算应该多分配的buckets数量
nbuckets += bucketShift(b - 4)
sz := t.bucket.size * nbuckets
up := roundupsize(sz)
if up != sz {
nbuckets = up / t.bucket.size
}
}
// 如果不是 dirtyalloc,新分配map空间时,dirtyalloc为nil
if dirtyalloc == nil {
// 申请buckets数组
buckets = newarray(t.bucket, int(nbuckets))
} else {
// dirtyalloc was previously generated by
// the above newarray(t.bucket, int(nbuckets))
// but may not be empty.
buckets = dirtyalloc
size := t.bucket.size * nbuckets
if t.bucket.kind&kindNoPointers == 0 {
memclrHasPointers(buckets, size)
} else {
memclrNoHeapPointers(buckets, size)
}
}
// 判断是否多申请了buckets,多申请的buckets放在nextOverflow里面以备后用
if base != nbuckets {
nextOverflow = (*bmap)(add(buckets, base*uintptr(t.bucketsize)))
last := (*bmap)(add(buckets, (nbuckets-1)*uintptr(t.bucketsize)))
last.setoverflow(t, (*bmap)(buckets))
}
return buckets, nextOverflow
}
初始化的过程到此就结束了,比较简单,就是根据初始化的大小,确定buckets的数量,并分配内存等
查找(mapaccess)
在上面的go tool 分析过程中可以发现
- _ = m["444"] 对应
mapaccess1 - _, _ = m["444"] 对应
mapaccess2
两个函数的逻辑大致相同,我们以mapaccess1为例来分析
mapaccess
func mapaccess1(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
// 如果h还没有实例化,或者还没有值,返回零值
if h == nil || h.count == 0 {
return unsafe.Pointer(&zeroVal[0])
}
// 判断当前map是否处于 写 的过程中,读写冲突
if h.flags&hashWriting != 0 {
throw("concurrent map read and map write")
}
// 根据初始化生产的hash随机种子hash0,计算key的hash值
alg := t.key.alg
hash := alg.hash(key, uintptr(h.hash0))
m := bucketMask(h.B)
// 根据key的hash值,计算出对应的bucket的位置,计算过程后面图示
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize)))
// 扩容的过程中,oldbuckets不为空,所以这时候,这时候需要判断,目标bucket是否已经迁移完成了,扩容的时候细讲
if c := h.oldbuckets; c != nil {
if !h.sameSizeGrow() {
// There used to be half as many buckets; mask down one more power of two.
m >>= 1
}
// 如果目标bucket在扩容中还没有迁移,则到oldbuckets中找目标bucket
oldb := (*bmap)(add(c, (hash&m)*uintptr(t.bucketsize)))
if !evacuated(oldb) {
b = oldb
}
}
// 计算出key的tophash,用于比对
top := tophash(hash)
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
// 如果tophash不一致,key肯定不同,继续寻找下一个
if b.tophash[i] != top {
continue
}
// tophash一直,需要判断key是否一致
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey {
k = *((*unsafe.Pointer)(k))
}
// key也是相同的,则返回对应的value
if alg.equal(key, k) {
v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
if t.indirectvalue {
v = *((*unsafe.Pointer)(v))
}
return v
}
}
}
return unsafe.Pointer(&zeroVal[0])
}
overflow
这个函数就是找bmap的overflow的地址,通过结构图中可以看出,找到bmap结构体的最后一个指针占用的内存单元就是overflow指向的下一个bmap的地址了
func (b *bmap) overflow(t *maptype) *bmap {
return *(**bmap)(add(unsafe.Pointer(b), uintptr(t.bucketsize)-sys.PtrSize))
}
上面的逻辑比较简单,但是在这里有几个问题需要解决
- bucket(bmap结构体)是怎么确定的
- tophash是怎么确定的
- key和value的地址为什么是通过偏移来计算的
先放一下buckets和bmap的放大图
-
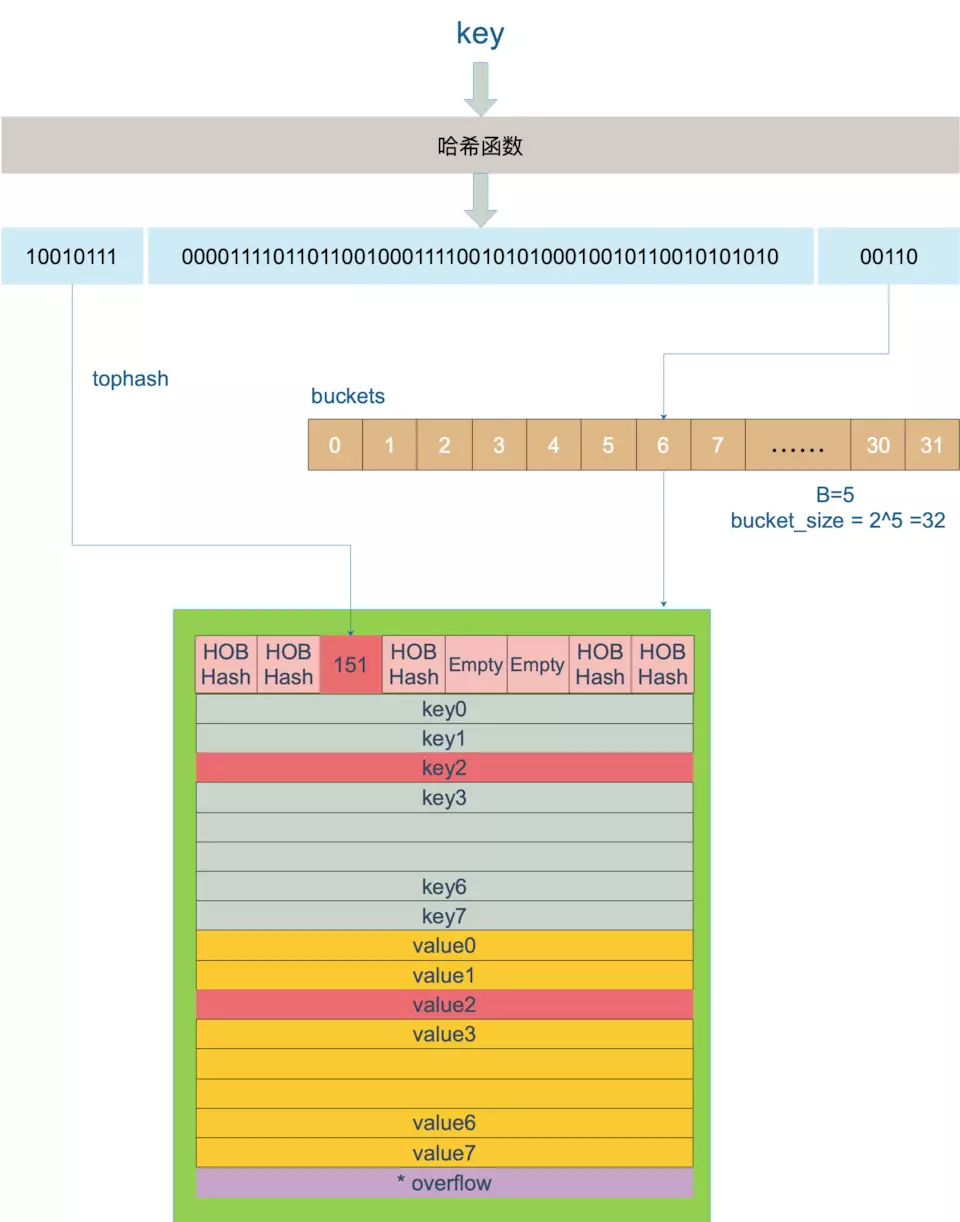
bucket(bmap结构体)是怎么确定的
bucket := hash & bucketMask(h.B) b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + bucket*uintptr(t.bucketsize)))加入B=5,则说明buckets的数量为2^5 = 32,则取hash的末5位,来计算出目标bucket的索引,图中计算出索引为6,所以,在buckets上偏移6个bucket大小的地址,即可找到对应的bucket
-
tophash是怎么确定的
func tophash(hash uintptr) uint8 { top := uint8(hash >> (sys.PtrSize*8 - 8)) if top < minTopHash { top += minTopHash } return top }每个bucket的tophash数组的长度为8,所以,这里直接去hash值的前8位计算出来数值,既是tophash了
-
key和value的地址为什么是通过偏移来计算的
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize)) val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))根据最开始的数据结构分析和上面的bmap图示,可以看出bmap中所有的key是放在一起的,所有的value是放在一起的,dataoffset是tophash[8]所占用的大小,所以,key所在的地址也就是 b的地址+dataOffset的偏移+对应的索引i*key的大小,同理value是排列在key的后面的
插入
mapassign
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
if h == nil {
panic(plainError("assignment to entry in nil map"))
}
// map并发读写的处理,直接抛异常
if h.flags&hashWriting != 0 {
throw("concurrent map writes")
}
// 根据map的hash种子 hash0,计算key的hash值
alg := t.key.alg
hash := alg.hash(key, uintptr(h.hash0))
// Set hashWriting after calling alg.hash, since alg.hash may panic,
// in which case we have not actually done a write.
h.flags |= hashWriting
// 如果map没有buckets,就分配(make(map)不指定map长度的时候就会惰性分配buckets)
if h.buckets == nil {
h.buckets = newobject(t.bucket) // newarray(t.bucket, 1)
}
again:
// 根据计算出的hash值,来确定应该插入的bucket在buckets中的索引
bucket := hash & bucketMask(h.B)
// 判断是否在扩容map,growWork是来完成扩容操作的
if h.growing() {
growWork(t, h, bucket)
}
// 确认bucket的地址
b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + bucket*uintptr(t.bucketsize)))
// 根据计算出hash二进制前八位的值,作为tophash使用
top := tophash(hash)
var inserti *uint8
var insertk unsafe.Pointer
var val unsafe.Pointer
for {
for i := uintptr(0); i < bucketCnt; i++ {
// 循环遍历tophash数组,如果数组的索引位置为空,先拿过来使用
if b.tophash[i] != top {
if b.tophash[i] == empty && inserti == nil {
inserti = &b.tophash[i]
insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
}
continue
}
// 找到了tophash数组中找到了当前key的tophash一致的情况
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
// 如果key是指针,获取指针对应的数据
if t.indirectkey {
k = *((*unsafe.Pointer)(k))
}
// 判断这两个key是否相同,不同继续寻找
if !alg.equal(key, k) {
continue
}
// already have a mapping for key. Update it.
if t.needkeyupdate {
typedmemmove(t.key, k, key)
}
// 根据i找到value应该存放的位置,可以结合结构图中bmap的数据结构来理解
val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
goto done
}
// buckets中没有找到空余的位置或者相同的key,则到overflow中查找
ovf := b.overflow(t)
if ovf == nil {
break
}
b = ovf
}
// Did not find mapping for key. Allocate new cell & add entry.
// If we hit the max load factor or we have too many overflow buckets,
// and we're not already in the middle of growing, start growing.
// 判断是否需要扩容
if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {
hashGrow(t, h)
goto again // Growing the table invalidates everything, so try again
}
// inerti==nil,表示map的buckets都满了,则需要新加一个overflow挂载到map和对应的bmap下
if inserti == nil {
// all current buckets are full, allocate a new one.
newb := h.newoverflow(t, b)
inserti = &newb.tophash[0]
insertk = add(unsafe.Pointer(newb), dataOffset)
val = add(insertk, bucketCnt*uintptr(t.keysize))
}
// store new key/value at insert position
// 存储key value到指定的位置
if t.indirectkey {
kmem := newobject(t.key)
*(*unsafe.Pointer)(insertk) = kmem
insertk = kmem
}
if t.indirectvalue {
vmem := newobject(t.elem)
*(*unsafe.Pointer)(val) = vmem
}
typedmemmove(t.key, insertk, key)
*inserti = top
h.count++
done:
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}
// 修改map的flags
h.flags &^= hashWriting
if t.indirectvalue {
val = *((*unsafe.Pointer)(val))
}
return val
}
setoverflow
func (h *hmap) newoverflow(t *maptype, b *bmap) *bmap {
var ovf *bmap
// 先去找一下预先分配的有没有剩余的overflow
if h.extra != nil && h.extra.nextOverflow != nil {
// We have preallocated overflow buckets available.
// See makeBucketArray for more details.
// 预先分配的有,直接使用预先分配的,然后更新一下 下一个可以用overflow => nextOverflow
ovf = h.extra.nextOverflow
if ovf.overflow(t) == nil {
// We're not at the end of the preallocated overflow buckets. Bump the pointer.
h.extra.nextOverflow = (*bmap)(add(unsafe.Pointer(ovf), uintptr(t.bucketsize)))
} else {
// This is the last preallocated overflow bucket.
// Reset the overflow pointer on this bucket,
// which was set to a non-nil sentinel value.
ovf.setoverflow(t, nil)
h.extra.nextOverflow = nil
}
} else {
ovf = (*bmap)(newobject(t.bucket))
}
// 增加noverflow
h.incrnoverflow()
if t.bucket.kind&kindNoPointers != 0 {
h.createOverflow()
*h.extra.overflow = append(*h.extra.overflow, ovf)
}
// 把当前overflow,挂载到bmap的overflow链表后面
b.setoverflow(t, ovf)
return ovf
}
overflow指向的就是一个bmap结构,而bmap结构的最后一个地址,存储的是overflow的地址,通过bmap.overflow可以将bmap的所有overflow串联起来,hmap.extra.nextOverflow也是一样的逻辑
扩容
在mapassign函数中可以看到,扩容发生的情况有两种
overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)
- 超过设定的负载值
- 有太多的overflow
先来看一下这两个函数
overLoadFactor
func overLoadFactor(count int, B uint8) bool {
// loadFactorNum = 13; loadFactorDen = 2
return count > bucketCnt && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
}
uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen) 可以简化为 count / (2^B) > 6.5, 这个6.5便是代表loadFactor的负载系数
##tooManyOverflowBuckets
func tooManyOverflowBuckets(noverflow uint16, B uint8) bool {
// If the threshold is too low, we do extraneous work.
// If the threshold is too high, maps that grow and shrink can hold on to lots of unused memory.
// "too many" means (approximately) as many overflow buckets as regular buckets.
// See incrnoverflow for more details.
if B > 15 {
B = 15
}
// The compiler doesn't see here that B < 16; mask B to generate shorter shift code.
return noverflow >= uint16(1)<<(B&15)
}
通过判断noverflow的数量来判断overflow是否太多
我们理解一下这两种情况扩容的原因
-
超过设定的负载值
根据key查找的过程中,根据末B位确定bucket,高8位确定tophash,但是查找tophash的过程中,是需要遍历整个bucket的,所以,最优的情况是每个bucket只存储一个key,这样就达到了hash的O(1)的查找效率,但是空间却大大的浪费了;如果所有的key都存储到了一个bucket里面面,就退变成了链表,查找效率就变成了O(n),所以装载系数就是为了平衡查找效率和存储空间的,当装载系数过大,就需要增加bucket了,来提高查找效率,即增量扩容
-
有太多的overflow
当bucket的空位全部填满的时候,装载系数就达到了8,为什么还会有tooManyOverflowBuckets的判断呢,map不仅有增加还有删除的操作,当某一个bucket的空位填满后,开始填充到overflow里面,这时候再删除bucket里面的数据,其实整个过程很有可能并没有触发 超过负载扩容机制的,(因为有较多的buckets),但是查找overflow的数据,就首先要遍历bucket的数据,这个就是无用功了,查找效率就低了,这时候需要不增加bucket数量的扩容,也就是等量扩容
扩容的工作是由hashGrow开始的,但是真正进行迁移工作的是evacuate, 由growWork进行d调用;在每一次的maassign和mapdelete的时候,会判断这个map是否正在进行扩容操作,如果是的,就迁移当前的bucket;所以,map的扩容并不是一蹴而就的,而是一个循序渐进的过程
hashGrow
func hashGrow(t *maptype, h *hmap) {
// If we've hit the load factor, get bigger.
// Otherwise, there are too many overflow buckets,
// so keep the same number of buckets and "grow" laterally.
// 判断是等量扩容还是增量扩容
bigger := uint8(1)
if !overLoadFactor(h.count+1, h.B) {
bigger = 0
h.flags |= sameSizeGrow
}
// 为map根据新的B(h.B+bigger为新的h.B)重新分配新的buckets和overflow
oldbuckets := h.buckets
newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil)
flags := h.flags &^ (iterator | oldIterator)
if h.flags&iterator != 0 {
flags |= oldIterator
}
// commit the grow (atomic wrt gc)
// 更新hmap相关的属性
h.B += bigger
h.flags = flags
h.oldbuckets = oldbuckets
h.buckets = newbuckets
h.nevacuate = 0
h.noverflow = 0
// 将老的map的extra和nextOverflow更新到新的map结构下面
if h.extra != nil && h.extra.overflow != nil {
// Promote current overflow buckets to the old generation.
if h.extra.oldoverflow != nil {
throw("oldoverflow is not nil")
}
h.extra.oldoverflow = h.extra.overflow
h.extra.overflow = nil
}
if nextOverflow != nil {
if h.extra == nil {
h.extra = new(mapextra)
}
h.extra.nextOverflow = nextOverflow
}
// the actual copying of the hash table data is done incrementally
// by growWork() and evacuate().
}
hashGrow 这个前菜已经准备完成了,接下来就交给growWork和 evacuate两个函数来完成的
growWork
func growWork(t *maptype, h *hmap, bucket uintptr) {
// make sure we evacuate the oldbucket corresponding
// to the bucket we're about to use
evacuate(t, h, bucket&h.oldbucketmask())
// evacuate one more oldbucket to make progress on growing
if h.growing() {
evacuate(t, h, h.nevacuate)
}
}
###evacuate
讲hmap中的一个bucket搬移到新的buckets中,老的bucket里key与新的buckets中位置的对应,同样参考map的查找过程
这里如何判断这个bucket是否已经搬移过了呢,主要就是依据evacuated函数来判断
func evacuated(b *bmap) bool {
h := b.tophash[0]
return h > empty && h < minTopHash
}
看了源码就发现原理很简单,就是对tophash[0]值的判断,那么肯定是在搬移之后设置的这个值,我们通过evacuate函数l哎一探究竟吧
func evacuate(t *maptype, h *hmap, oldbucket uintptr) {
b := (*bmap)(add(h.oldbuckets, oldbucket*uintptr(t.bucketsize)))
newbit := h.noldbuckets()
// 判断是否搬移过
if !evacuated(b) {
// TODO: reuse overflow buckets instead of using new ones, if there
// is no iterator using the old buckets. (If !oldIterator.)
// xy contains the x and y (low and high) evacuation destinations.
// 吧bucket原先对应的索引赋值给x
var xy [2]evacDst
x := &xy[0]
x.b = (*bmap)(add(h.buckets, oldbucket*uintptr(t.bucketsize)))
x.k = add(unsafe.Pointer(x.b), dataOffset)
x.v = add(x.k, bucketCnt*uintptr(t.keysize))
// 如果是增量扩容,扩容后的bucket有变,假如以B=5为例,B+1= 6,这时候去倒数6位计算bucket的索引,但是倒数第6位只能是0或者1,也就是说索引只能是,x或y(x+newbit),这里计算出来y,以备后用
if !h.sameSizeGrow() {
// Only calculate y pointers if we're growing bigger.
// Otherwise GC can see bad pointers.
y := &xy[1]
y.b = (*bmap)(add(h.buckets, (oldbucket+newbit)*uintptr(t.bucketsize)))
y.k = add(unsafe.Pointer(y.b), dataOffset)
y.v = add(y.k, bucketCnt*uintptr(t.keysize))
}
// 进行搬移
for ; b != nil; b = b.overflow(t) {
k := add(unsafe.Pointer(b), dataOffset)
v := add(k, bucketCnt*uintptr(t.keysize))
for i := 0; i < bucketCnt; i, k, v = i+1, add(k, uintptr(t.keysize)), add(v, uintptr(t.valuesize)) {
top := b.tophash[i]
// 空的跳过
if top == empty {
b.tophash[i] = evacuatedEmpty
continue
}
if top < minTopHash {
throw("bad map state")
}
k2 := k
if t.indirectkey {
k2 = *((*unsafe.Pointer)(k2))
}
var useY uint8
if !h.sameSizeGrow() {
// Compute hash to make our evacuation decision (whether we need
// to send this key/value to bucket x or bucket y).
// 判断hash计算出来,是使用x还是y,等量扩容是使用x
hash := t.key.alg.hash(k2, uintptr(h.hash0))
if h.flags&iterator != 0 && !t.reflexivekey && !t.key.alg.equal(k2, k2) {
// If key != key (NaNs), then the hash could be (and probably
// will be) entirely different from the old hash. Moreover,
// it isn't reproducible. Reproducibility is required in the
// presence of iterators, as our evacuation decision must
// match whatever decision the iterator made.
// Fortunately, we have the freedom to send these keys either
// way. Also, tophash is meaningless for these kinds of keys.
// We let the low bit of tophash drive the evacuation decision.
// We recompute a new random tophash for the next level so
// these keys will get evenly distributed across all buckets
// after multiple grows.
useY = top & 1
top = tophash(hash)
} else {
if hash&newbit != 0 {
useY = 1
}
}
}
if evacuatedX+1 != evacuatedY {
throw("bad evacuatedN")
}
b.tophash[i] = evacuatedX + useY // evacuatedX + 1 == evacuatedY
dst := &xy[useY] // evacuation destination
// 如果目标的bucket已经满了,则新建overflow,挂载到bucket上,并使用这个overflow
if dst.i == bucketCnt {
dst.b = h.newoverflow(t, dst.b)
dst.i = 0
dst.k = add(unsafe.Pointer(dst.b), dataOffset)
dst.v = add(dst.k, bucketCnt*uintptr(t.keysize))
}
// 拷贝key value,设置tophash数组的对应索引的值
dst.b.tophash[dst.i&(bucketCnt-1)] = top // mask dst.i as an optimization, to avoid a bounds check
if t.indirectkey {
*(*unsafe.Pointer)(dst.k) = k2 // copy pointer
} else {
typedmemmove(t.key, dst.k, k) // copy value
}
if t.indirectvalue {
*(*unsafe.Pointer)(dst.v) = *(*unsafe.Pointer)(v)
} else {
typedmemmove(t.elem, dst.v, v)
}
dst.i++
// These updates might push these pointers past the end of the
// key or value arrays. That's ok, as we have the overflow pointer
// at the end of the bucket to protect against pointing past the
// end of the bucket.
dst.k = add(dst.k, uintptr(t.keysize))
dst.v = add(dst.v, uintptr(t.valuesize))
}
}
// Unlink the overflow buckets & clear key/value to help GC.
if h.flags&oldIterator == 0 && t.bucket.kind&kindNoPointers == 0 {
b := add(h.oldbuckets, oldbucket*uintptr(t.bucketsize))
// Preserve b.tophash because the evacuation
// state is maintained there.
ptr := add(b, dataOffset)
n := uintptr(t.bucketsize) - dataOffset
memclrHasPointers(ptr, n)
}
}
if oldbucket == h.nevacuate {
advanceEvacuationMark(h, t, newbit)
}
}
扩容是逐步进行的,一次搬运一个bucket
我们以原先的B=5为例,现在增量扩容后B=6,但是hash的倒数第6位只能是0或1,也就是说,如果原先计算出来的bucket索引为6的话,即 00110,那么新的bucket对应的索引只能是 100110(6+2^5)或 000110(6),x对应的就是6,y对应的就是(6+2^5);如果是等量扩容,那么索引肯定就是不变的,这时候就不需要y了
找到对应的新的bucket之后,按顺序依次存放就ok了
删除
mapdelete
删除的逻辑比较简单,根据key查找,找到就清空key和value及tophash
func mapdelete(t *maptype, h *hmap, key unsafe.Pointer) {
if h == nil || h.count == 0 {
return
}
// 读写冲突
if h.flags&hashWriting != 0 {
throw("concurrent map writes")
}
// 下面一大片的计算hash,查找bucket,查到bucket里面的key,逻辑一样,就不重复了
alg := t.key.alg
hash := alg.hash(key, uintptr(h.hash0))
// Set hashWriting after calling alg.hash, since alg.hash may panic,
// in which case we have not actually done a write (delete).
h.flags |= hashWriting
bucket := hash & bucketMask(h.B)
if h.growing() {
growWork(t, h, bucket)
}
b := (*bmap)(add(h.buckets, bucket*uintptr(t.bucketsize)))
top := tophash(hash)
search:
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
if b.tophash[i] != top {
continue
}
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
k2 := k
if t.indirectkey {
k2 = *((*unsafe.Pointer)(k2))
}
if !alg.equal(key, k2) {
continue
}
// Only clear key if there are pointers in it.
// 这里找到了key,如果key是指针,设为nil,否则清空key对应内存的数据
if t.indirectkey {
*(*unsafe.Pointer)(k) = nil
} else if t.key.kind&kindNoPointers == 0 {
memclrHasPointers(k, t.key.size)
}
// 同理删除v
v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
if t.indirectvalue {
*(*unsafe.Pointer)(v) = nil
} else if t.elem.kind&kindNoPointers == 0 {
memclrHasPointers(v, t.elem.size)
} else {
memclrNoHeapPointers(v, t.elem.size)
}
// 把tophash设置为0,并更新count属性
b.tophash[i] = empty
h.count--
break search
}
}
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}
h.flags &^= hashWriting
}
遍历
按一般的思维来考虑,遍历值需要遍历buckets数组里面的每个bucket以及bucket下挂的overflow链表即可,但是map存在扩容的情况,这样就会导致遍历的难度增大了,我们看一下go是怎么实现的
根据go tool 的分析,我们可以简单看一下遍历时的流程信息
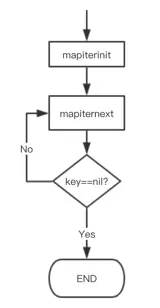
mapiterinit
func mapiterinit(t *maptype, h *hmap, it *hiter) {
if h == nil || h.count == 0 {
return
}
if unsafe.Sizeof(hiter{})/sys.PtrSize != 12 {
throw("hash_iter size incorrect") // see cmd/compile/internal/gc/reflect.go
}
// 设置iter的属性
it.t = t
it.h = h
// grab snapshot of bucket state
it.B = h.B
it.buckets = h.buckets
if t.bucket.kind&kindNoPointers != 0 {
// Allocate the current slice and remember pointers to both current and old.
// This preserves all relevant overflow buckets alive even if
// the table grows and/or overflow buckets are added to the table
// while we are iterating.
h.createOverflow()
it.overflow = h.extra.overflow
it.oldoverflow = h.extra.oldoverflow
}
// decide where to start
// 随机生成一个种子,并根据这个随机种子计算出startBucket和offset,保证遍历的随机性
r := uintptr(fastrand())
if h.B > 31-bucketCntBits {
r += uintptr(fastrand()) << 31
}
it.startBucket = r & bucketMask(h.B)
it.offset = uint8(r >> h.B & (bucketCnt - 1))
// iterator state
it.bucket = it.startBucket
// Remember we have an iterator.
// Can run concurrently with another mapiterinit().
if old := h.flags; old&(iterator|oldIterator) != iterator|oldIterator {
atomic.Or8(&h.flags, iterator|oldIterator)
}
// 开始遍历
mapiternext(it)
}
mapiternext
func mapiternext(it *hiter) {
h := it.h
if raceenabled {
callerpc := getcallerpc()
racereadpc(unsafe.Pointer(h), callerpc, funcPC(mapiternext))
}
if h.flags&hashWriting != 0 {
throw("concurrent map iteration and map write")
}
t := it.t
bucket := it.bucket
b := it.bptr
i := it.i
checkBucket := it.checkBucket
alg := t.key.alg
next:
// b==nil说明bucket.overflow链表已经遍历完成了,遍历下一个bucket
if b == nil {
// 遍历到了开始的bucket,而且startBucket被遍历过了,则说明整个map遍历完成了
if bucket == it.startBucket && it.wrapped {
// end of iteration
it.key = nil
it.value = nil
return
}
// 如果hmap正在扩容,则判断当前遍历的bucket是否搬移完了,搬移完了,使用新得bucket,否则使用oldbucket
if h.growing() && it.B == h.B {
// Iterator was started in the middle of a grow, and the grow isn't done yet.
// If the bucket we're looking at hasn't been filled in yet (i.e. the old
// bucket hasn't been evacuated) then we need to iterate through the old
// bucket and only return the ones that will be migrated to this bucket.
oldbucket := bucket & it.h.oldbucketmask()
b = (*bmap)(add(h.oldbuckets, oldbucket*uintptr(t.bucketsize)))
if !evacuated(b) {
checkBucket = bucket
} else {
b = (*bmap)(add(it.buckets, bucket*uintptr(t.bucketsize)))
checkBucket = noCheck
}
} else {
b = (*bmap)(add(it.buckets, bucket*uintptr(t.bucketsize)))
checkBucket = noCheck
}
bucket++
// 遍历到了数组末尾,从数组头继续遍历
if bucket == bucketShift(it.B) {
bucket = 0
it.wrapped = true
}
i = 0
}
// 遍历当前bucket或者bucket.overflow里面的数据
for ; i < bucketCnt; i++ {
// 通过offset与i,确定正在遍历的bucket的tophash的索引
offi := (i + it.offset) & (bucketCnt - 1)
if b.tophash[offi] == empty || b.tophash[offi] == evacuatedEmpty {
continue
}
// 根据偏移量i,确定key和value的地址
k := add(unsafe.Pointer(b), dataOffset+uintptr(offi)*uintptr(t.keysize))
if t.indirectkey {
k = *((*unsafe.Pointer)(k))
}
v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+uintptr(offi)*uintptr(t.valuesize))
if checkBucket != noCheck && !h.sameSizeGrow() {
// 说明增量扩容中,需要进一步判断
// Special case: iterator was started during a grow to a larger size
// and the grow is not done yet. We're working on a bucket whose
// oldbucket has not been evacuated yet. Or at least, it wasn't
// evacuated when we started the bucket. So we're iterating
// through the oldbucket, skipping any keys that will go
// to the other new bucket (each oldbucket expands to two
// buckets during a grow).
if t.reflexivekey || alg.equal(k, k) {
// 数据还没有从oldbucket迁移到新的bucket里面,判断这个key重新计算后是否与oldbucket的索引一致,不一致则跳过
// If the item in the oldbucket is not destined for
// the current new bucket in the iteration, skip it.
hash := alg.hash(k, uintptr(h.hash0))
if hash&bucketMask(it.B) != checkBucket {
continue
}
} else {
// Hash isn't repeatable if k != k (NaNs). We need a
// repeatable and randomish choice of which direction
// to send NaNs during evacuation. We'll use the low
// bit of tophash to decide which way NaNs go.
// NOTE: this case is why we need two evacuate tophash
// values, evacuatedX and evacuatedY, that differ in
// their low bit.
if checkBucket>>(it.B-1) != uintptr(b.tophash[offi]&1) {
continue
}
}
}
if (b.tophash[offi] != evacuatedX && b.tophash[offi] != evacuatedY) ||
!(t.reflexivekey || alg.equal(k, k)) {
// 这里的数据不是正在扩容中的数据,可以直接使用
// This is the golden data, we can return it.
// OR
// key!=key, so the entry can't be deleted or updated, so we can just return it.
// That's lucky for us because when key!=key we can't look it up successfully.
it.key = k
if t.indirectvalue {
v = *((*unsafe.Pointer)(v))
}
it.value = v
} else {
// The hash table has grown since the iterator was started.
// The golden data for this key is now somewhere else.
// Check the current hash table for the data.
// This code handles the case where the key
// has been deleted, updated, or deleted and reinserted.
// NOTE: we need to regrab the key as it has potentially been
// updated to an equal() but not identical key (e.g. +0.0 vs -0.0).
// 在遍历开始之后,这个map进行了扩容,数据可能不正确,重新查找获取一下
rk, rv := mapaccessK(t, h, k)
if rk == nil {
continue // key has been deleted
}
it.key = rk
it.value = rv
}
it.bucket = bucket
if it.bptr != b { // avoid unnecessary write barrier; see issue 14921
it.bptr = b
}
it.i = i + 1
it.checkBucket = checkBucket
return
}
// 遍历bucket.overflow链表
b = b.overflow(t)
i = 0
goto next
}
整体思路如下:
- 首先从buckets数组中,随机确定一个索引,作为startBucket,然后确定offset偏移量,作为起始key的地址
- 遍历当前bucket及bucket.overflow,判断当前bucket是否正在扩容中,如果是则跳转到3,否则跳转到4
- 加入原先的buckets为0,1,那么扩容后的新的buckets为0,1,2,3,此时我们遍历到了buckets[0], 发现这个bucket正在扩容,那么找到bucket[0]所对应的oldbuckets[0],遍历里面的key,这时候是遍历所有的吗?当然不是,而是仅仅遍历那些key经过hash,可以散列到bucket[0]里面的部分key;同理,当遍历到bucket[2]的时候,发现bucket正在扩容,找到oldbuckets[0],然后遍历里面可以散列到bucket[2]的那些key
- 遍历当前这个bucket即可
- 继续遍历bucket下面的overflow链表
- 如果遍历到了startBucket,说明遍历完了,结束遍历
