

关联系列
Android AOSP基础系列
Android系统启动系列
应用进程启动系列
Android深入四大组件系列
Android深入理解Context系列
Android深入理解JNI系列
Android解析WindowManager
Android解析WMS系列
Android解析AMS系列
Android包管理机制系列
Android输入系统系列
本文首发于微信公众号「后厂技术官」
前言
在上一篇文章中,我们学习了ServiceManager中的Binder机制,有一个问题由于篇幅问题没有讲完,那就是MediaPlayerService是如何注册的。通过了解MediaPlayerService是如何注册的,可以得知系统服务的注册过程。
1.从调用链角度说明MediaPlayerService是如何注册的
我们先来看MediaServer的入口函数,代码如下所示。 frameworks/av/media/mediaserver/main_mediaserver.cpp
int main(int argc __unused, char **argv __unused)
{
signal(SIGPIPE, SIG_IGN);
//获取ProcessState实例
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm(defaultServiceManager());
ALOGI("ServiceManager: %p", sm.get());
InitializeIcuOrDie();
//注册MediaPlayerService
MediaPlayerService::instantiate();//1
ResourceManagerService::instantiate();
registerExtensions();
//启动Binder线程池
ProcessState::self()->startThreadPool();
//当前线程加入到线程池
IPCThreadState::self()->joinThreadPool();
}
这段代码中的很多内容都在上一篇文章介绍过了,接着分析注释1处的代码。
frameworks/av/media/libmediaplayerservice/MediaPlayerService.cpp
void MediaPlayerService::instantiate() {
defaultServiceManager()->addService(
String16("media.player"), new MediaPlayerService,());
}
defaultServiceManager返回的是BpServiceManager,不清楚的看[Android Binder原理(二)ServiceManager中的Binder机制][1]这篇文章。参数是一个字符串和MediaPlayerService,看起来像是Key/Value的形式来完成注册,接着看addService函数。
frameworks/native/libs/binder/IServiceManager.cpp
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated, int dumpsysPriority) {
Parcel data, reply;//数据包
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name); //name值为"media.player"
data.writeStrongBinder(service); //service值为MediaPlayerService
data.writeInt32(allowIsolated ? 1 : 0);
data.writeInt32(dumpsysPriority);
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);//1
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
data是一个数据包,后面会不断的将数据写入到data中, 注释1处的remote()指的是mRemote,也就是BpBinder。addService函数的作用就是将请求数据打包成data,然后传给BpBinder的transact函数,代码如下所示。 frameworks/native/libs/binder/BpBinder.cpp
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
BpBinder将逻辑处理交给IPCThreadState,先来看IPCThreadState::self()干了什么? frameworks/native/libs/binder/IPCThreadState.cpp
IPCThreadState* IPCThreadState::self()
{
//首次进来gHaveTLS的值为false
if (gHaveTLS) {
restart:
const pthread_key_t k = gTLS;//1
IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k);//2
if (st) return st;
return new IPCThreadState;//3
}
...
pthread_mutex_unlock(&gTLSMutex);
goto restart;
}
注释1处的TLS的全称为Thread local storage,指的是线程本地存储空间,在每个线程中都有TLS,并且线程间不共享。注释2处用于获取TLS中的内容并赋值给IPCThreadState*指针。注释3处会新建一个IPCThreadState,这里可以得知IPCThreadState::self()实际上是为了创建IPCThreadState,它的构造函数如下所示。 frameworks/native/libs/binder/IPCThreadState.cpp
IPCThreadState::IPCThreadState()
: mProcess(ProcessState::self()),
mStrictModePolicy(0),
mLastTransactionBinderFlags(0)
{
pthread_setspecific(gTLS, this);//1
clearCaller();
mIn.setDataCapacity(256);
mOut.setDataCapacity(256);
}
注释1处的pthread_setspecific函数用于设置TLS,将IPCThreadState::self()获得的TLS和自身传进去。IPCThreadState中还包含mIn、一个mOut,其中mIn用来接收来自Binder驱动的数据,mOut用来存储发往Binder驱动的数据,它们默认大小都为256字节。 知道了IPCThreadState的构造函数,再回来查看IPCThreadState的transact函数。 frameworks/native/libs/binder/IPCThreadState.cpp
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err;
flags |= TF_ACCEPT_FDS;
...
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);//1
if (err != NO_ERROR) {
if (reply) reply->setError(err);
return (mLastError = err);
}
if ((flags & TF_ONE_WAY) == 0) {
...
if (reply) {
err = waitForResponse(reply);//2
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
...
} else {
//不需要等待reply的分支
err = waitForResponse(NULL, NULL);
}
return err;
}
调用BpBinder的transact函数实际上就是调用IPCThreadState的transact函数。注释1处的writeTransactionData函数用于传输数据,其中第一个参数BC_TRANSACTION代表向Binder驱动发送命令协议,向Binder设备发送的命令协议都以BC_开头,而Binder驱动返回的命令协议以BR_开头。这个命令协议我们先记住,后面会再次提到他。
现在分别来分析注释1的writeTransactionData函数和注释2处的waitForResponse函数。
1.1 writeTransactionData函数分析
frameworks/native/libs/binder/IPCThreadState.cpp
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;//1
tr.target.ptr = 0;
tr.target.handle = handle;//2
tr.code = code; //code=ADD_SERVICE_TRANSACTION
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();//3
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
} else if (statusBuffer) {
tr.flags |= TF_STATUS_CODE;
*statusBuffer = err;
tr.data_size = sizeof(status_t);
tr.data.ptr.buffer = reinterpret_cast<uintptr_t>(statusBuffer);
tr.offsets_size = 0;
tr.data.ptr.offsets = 0;
} else {
return (mLastError = err);
}
mOut.writeInt32(cmd); //cmd=BC_TRANSACTION
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}
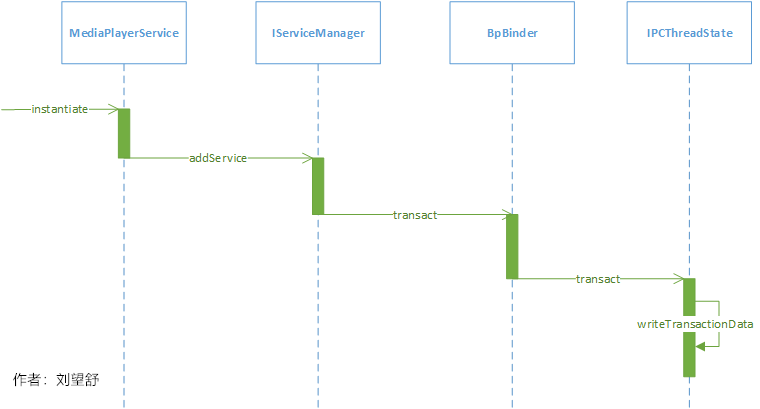
注释1处的binder_transaction_data结构体(tr结构体)是向Binder驱动通信的数据结构,注释2处将handle传递给target的handle,用于标识目标,这里的handle的值为0,代表了ServiceManager。 注释3处对数据data进行错误检查,如果没有错误就将数据赋值给对应的tr结构体。最后会将BC_TRANSACTION和tr结构体写入到mOut中。 上面代码调用链的时序图如下所示。
1.2 waitForResponse函数分析
接着回过头来查看waitForResponse函数做了什么,waitForResponse函数中的case语句很多,这里截取部分代码。
frameworks/native/libs/binder/IPCThreadState.cpp
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;//1
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = (uint32_t)mIn.readInt32();
IF_LOG_COMMANDS() {
alog << "Processing waitForResponse Command: "
<< getReturnString(cmd) << endl;
}
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT;
goto finish;
...
default:
//处理各种命令协议
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
...
return err;
}
注释1处的talkWithDriver函数的内部通过ioctl与Binder驱动进行通信,代码如下所示。 frameworks/native/libs/binder/IPCThreadState.cpp
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
if (mProcess->mDriverFD <= 0) {
return -EBADF;
}
//和Binder驱动通信的结构体
binder_write_read bwr; //1
//mIn是否有可读的数据,接收的数据存储在mIn
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();//2
//这时doReceive的值为true
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();//3
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
...
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
IF_LOG_COMMANDS() {
alog << "About to read/write, write size = " << mOut.dataSize() << endl;
}
#if defined(__ANDROID__)
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)//4
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
...
} while (err == -EINTR);
...
return err;
}
注释1处的 binder_write_read是和Binder驱动通信的结构体,在注释2和3处将mOut、mIn赋值给binder_write_read的相应字段,最终通过注释4处的ioctl函数和Binder驱动进行通信,这一部分涉及到Kernel Binder的内容 了,就不再详细介绍了,只需要知道在Kernel Binder中会记录服务名和handle,用于后续的服务查询。
1.3 小节
从调用链的角度来看,MediaPlayerService是如何注册的貌似并不复杂,因为这里只是简单的介绍了一个调用链分支,可以简单的总结为以下几个步骤:
- addService函数将数据打包发送给BpBinder来进行处理。
- BpBinder新建一个IPCThreadState对象,并将通信的任务交给IPCThreadState。
- IPCThreadState的writeTransactionData函数用于将命令协议和数据写入到mOut中。
- IPCThreadState的waitForResponse函数主要做了两件事,一件事是通过ioctl函数操作mOut和mIn来与Binder驱动进行数据交互,另一件事是处理各种命令协议。
2.从进程角度说明MediaPlayerService是如何注册的
实际上MediaPlayerService的注册还涉及到了进程,如下图所示。
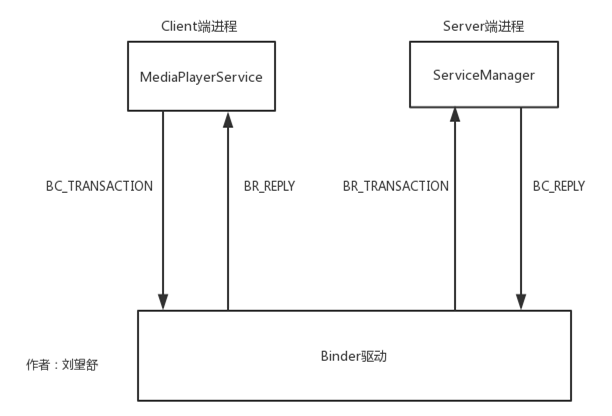
从图中看出是以C/S架构为基础,addService是在MediaPlayerService进行的,它是Client端,用于请求添加系统服务。而Server端则是指的是ServiceManager,用于完成系统服务的添加。 Client端和Server端分别运行在两个进程中,通过向Binder来进行通信。更详细点描述,就是两端通过向Binder驱动发送命令协议来完成系统服务的添加。这其中命令协议非常多,过程也比较复杂,这里对命令协议进行了简化,只涉及到了四个命令协议,其中 BC_TRANSACTION和BR_TRANSACTION过程是一个完整的事务,BC_REPLY和BR_REPLY是一个完整的事务。 Client端和Server端向Binder驱动发送命令协议以BC开头,而Binder驱动向Client端和Server端返回的命令协议以BR_开头。
步骤如下所示: 1.Client端向Binder驱动发送BC_TRANSACTION命令。 2.Binder驱动接收到请求后生成BR_TRANSACTION命令,唤醒Server端的线程后将BR_TRANSACTION命令发送给ServiceManager。 3.Server端中的服务注册完成后,生成BC_REPLY命令发送给Binder驱动。 4.Binder驱动生成BR_REPLY命令,唤醒Client端的线程后将BR_REPLY命令发送个Client端。
通过这些协议命令来驱动并完成系统服务的注册。
3.总结
本文分别从调用链角度和进程角度来讲解MediaPlayerService是如何注册的,间接的得出了服务是如何注册的 。这两个角度都比较复杂,因此这里分别对这两个角度做了简化,作为应用开发,我们不需要注重太多的过程和细节,只需要了解大概的步骤即可。
分享前沿技术、技术资讯、行业秘闻,技术管理,助力10万+程序员成长为技术官和架构师。

