前言
而在现如今 工业4.0 的改革崛起,工业互联网 和 5G 等 新基建 的发展下,工业管控在可视化系统的搭载上越来越广泛,比起传统的机房,智能机房在节省很多人力劳力的基础上,还带来更稳定的环境保障。
HT for Web 不止自主研发了强大的基于 HTML5 的 2D、3D 渲染引擎,为可视化提供了丰富的展示效果。介于 2D 组态和 3D 组态上,Hightopo(以下简称 HT )的 HT for Web 产品上的有着丰富的组态化可供选择,本文将运用 HT 搭载出一个基于 HTML5 WebGL 和 VR 技术的 3D 机房数据中心可视化系统。
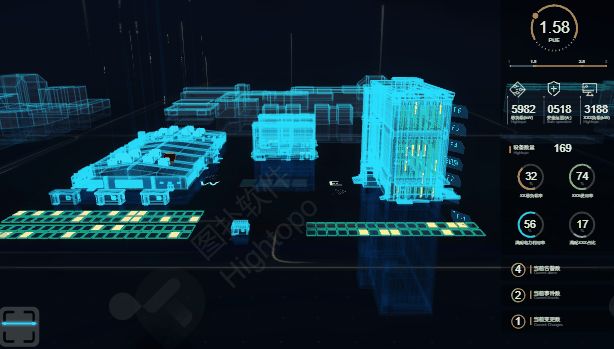
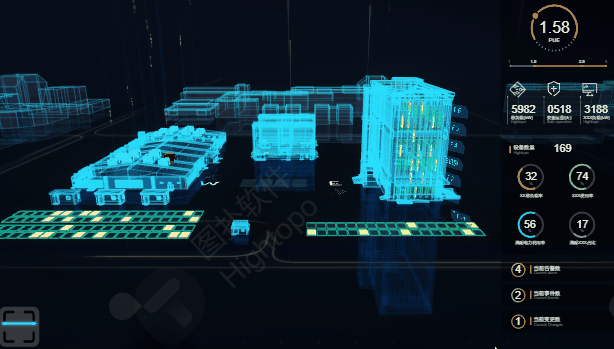
界面简介及效果预览
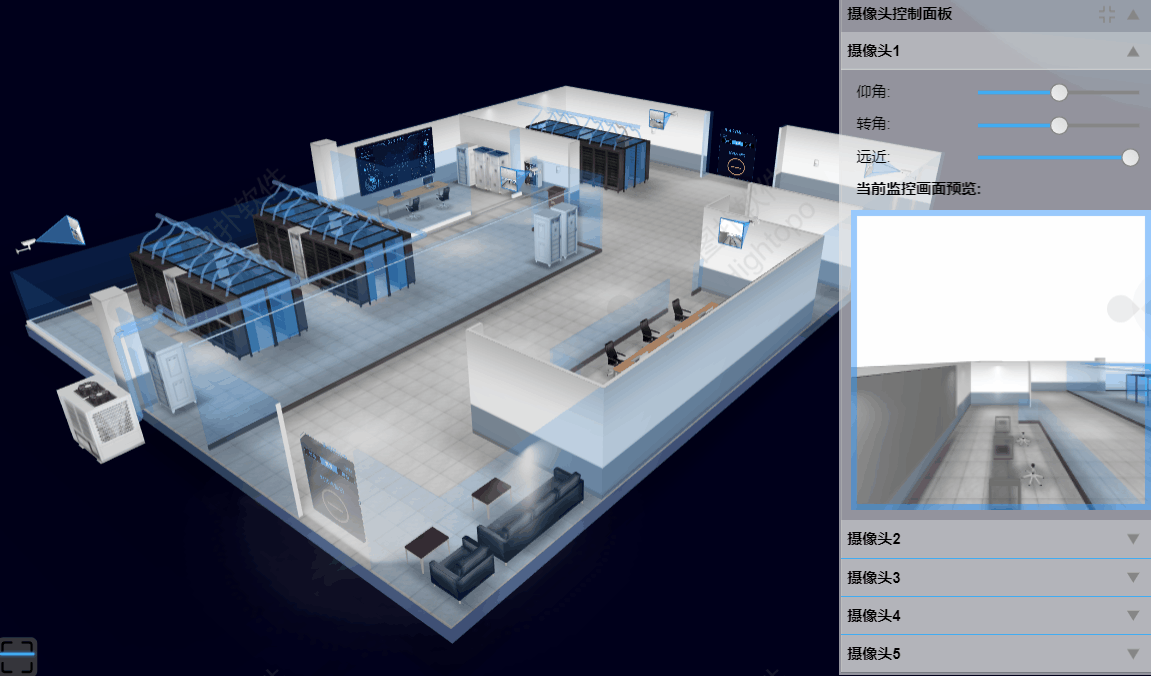
2、局部场景-摄像头效果图

系统分析

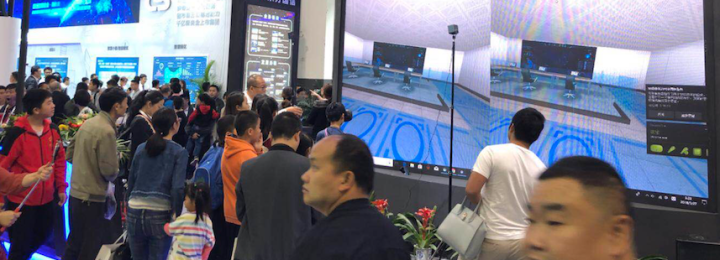
目前,在监控行业中,海康、大华等做监控行业领导者可基于这样的方式规划公共场所园区等的摄像头规划安放布局,可以通过海康、大华等摄像头品牌的摄像头参数,调整系统中摄像头模型的可视范围,监控方向等,更方便的让人们直观的了解摄像头的监控区域,监控角度等。
系统效果实现
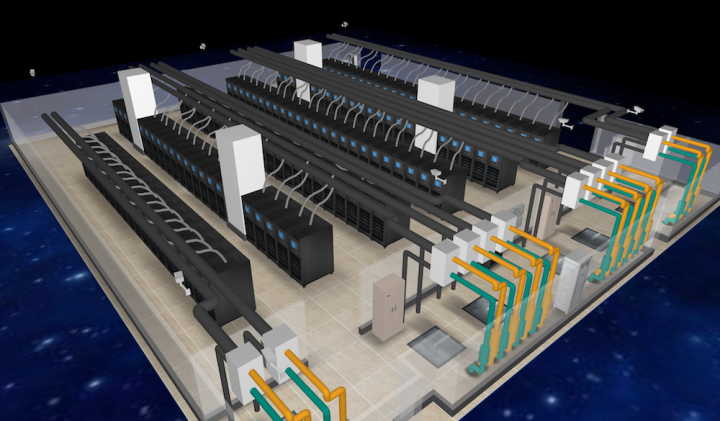
一、摄像头模型及场景
项目中场景通过 HT 的 3d 编辑器进行搭建,场景中的模型有些是通过 HT 建模,有些通过 3dMax 建模,之后导入 HT 中,场景中的地面白色的灯光,是通过 HT 的 3d 编辑器进行地面贴图呈现出来的效果。
二、锥体建模
HT 中通过 ht.Default.setShape3dModel(name, model) 函数,可注册自定义 3D 模型,摄像头前方生成的锥体便是通过该方法生成。可以将该锥体看成由 5 个顶点,6 个三角形组成,具体图如下:
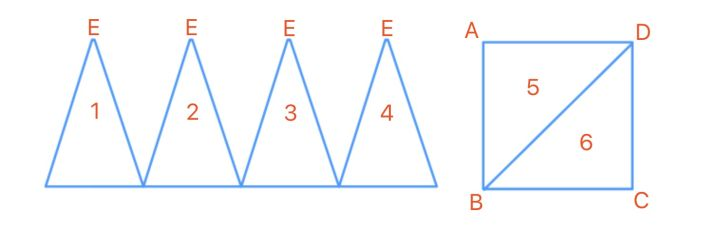
1. name 为模型名称,如果名称与预定义的一样,则会替换预定义的模型;
2. model 为JSON类型对象,其中 vs 表示顶点坐标数组,is 表示索引数组,uv 表示贴图坐标数组,如果想要单独定义某个面,可以通过 bottom_vs,bottom_is,bottom_uv,top_vs,top_is, top_uv 等来定义,之后便可以通过 shape3d.top.*, shape3d.bottom.* 等单独控制某个面。

实现中设置了锥体 style 对象的 wf.geometry 属性,通过该属性可以为锥体添加模型的线框,增强模型的立体效果,并且通过 wf.color,wf.width 等参数调节线框的颜色,粗细等。
三、摄像头图像生成原理
1、透视投影
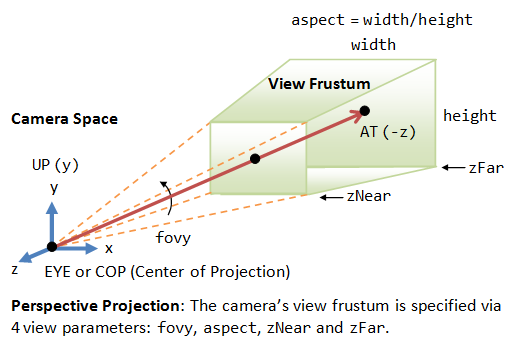
根据上图的描述,在本项目中可以在摄像头初始化之后,缓存当前 3d 场景 eyes 眼睛的位置,以及 center 中心的位置,之后将 3d 场景 eyes 眼睛和 center 中心设置成摄像头中心点的位置,然后在这个时刻获取当前 3d 场景的截图,该截图即为当前摄像头的监控图像,之后再将 3d 场景的 center 与 eyes 设置成开始时缓存的 eyes 与 center 位置,通过该方法即可实现 3d 场景中任意位置的快照,从而实现摄像头监控图像实时生成。
1. 创建一个新的 3d 场景,将当前场景的宽度与高度都设置为 200px 的大小,并且当前 3d 场景的内容与主屏的场景是一样的,HT中通过 new ht.graph3d.Graph3dView(dataModel) 来新建场景,其中的 dataModel 为当前场景的所有图元,所以主屏与离屏的 3d 场景都共用同一个 dataModel,保证了场景的一致。
2. 将新创建的场景位置设置成屏幕看不到的地方,并且添加进 dom 中。
3. 将之前对主屏获取图像的操作变成对离屏获取图像的操作,此时离屏图像的大小相对之前主屏获取图像的大小小很多,并且离屏获取不需要保存原来的眼睛 eyes 的位置以及 center 中心的位置,因为我们没有改变主屏的 eyes 与 center 的位置, 所以也减少的切换带来的开销,大大提高了摄像头获取图像的速度。
在视角的实现中有一个 getCenter 方法是用于获取 3d 场景中点 A 绕着点 B 旋转 angle 角度之后得到的点 A 在 3d 场景中的位置,方法中采用了 HT 封装的 ht.Math 下面的方法这里应用到向量的部分知识,具体如下:
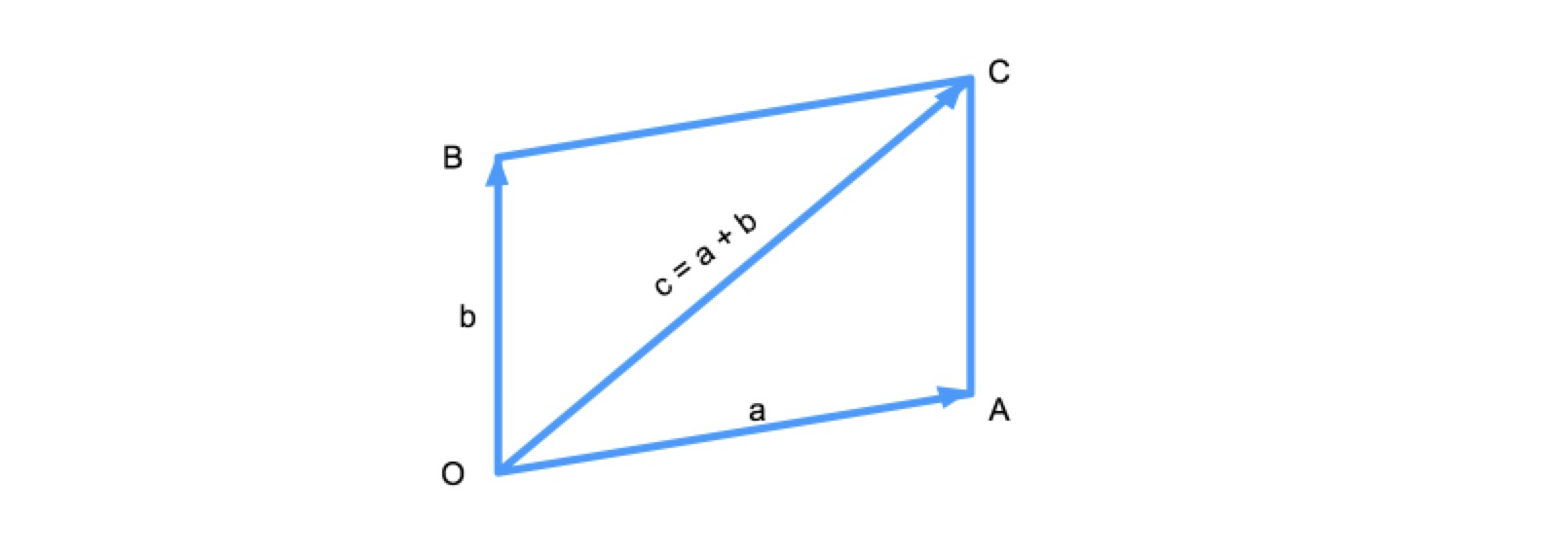
2. 通过 new ht.Math.Vector3() 创建 v1,v2 两个向量。
3. v1.fromArray(pointB) 为建立一个从原点到 pointB 的一个向量。
4. v2.fromArray(pointA) 为建立一个从原点到 pointA 的一个向量。
5. v1.fromArray(pointB).sub(v2.fromArray(pointA)) 即向量 OB - OA 此时得到的向量为 AB,此时 v1 变为向量 AB。
6. v2.copy(v1) v2 向量拷贝 v1 向量,之后通过 v2.copy(v1).applyMatrix4(mtrx) 对 v2 向量应用旋转矩阵,变换之后即为 v1向量绕着 pointA 旋转之后的的向量 v2。
7. 此时通过 v2.sub(v1) 就获取了起始点为 pointB,终点为 pointB 旋转之后点构成的向量,该向量此时即为 v2。
8. 通过向量公式得到旋转之后的点为 [pointB[0] + v2.x, pointB[1] + v2.y, pointB[2] + v2.z]。
2、2D 图像贴到 3D 模型
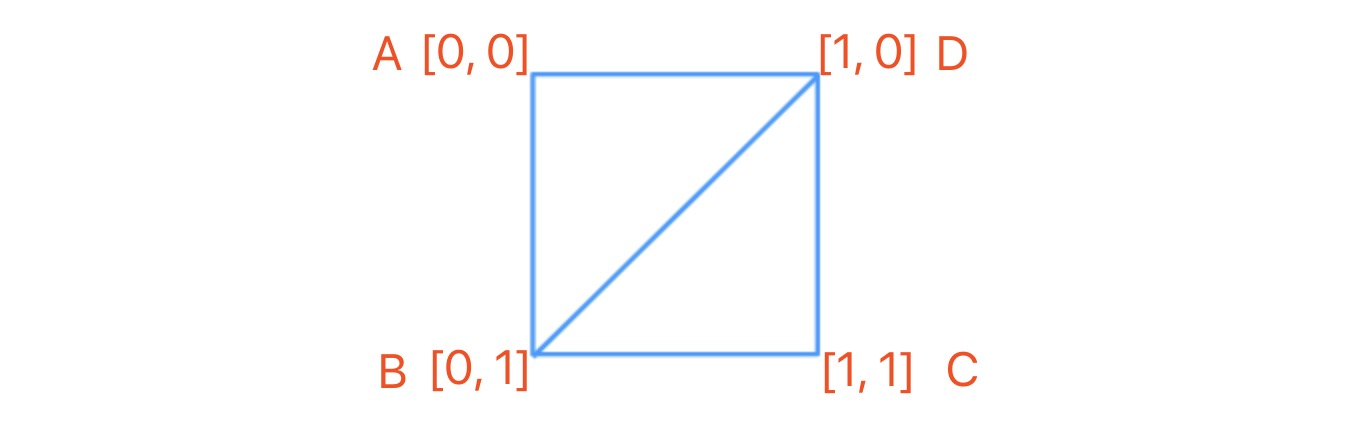
from_uv: [0, 0, 1, 0, 1, 1, 0, 1]
from_uv 就是定义贴图的位置数组,根据上图的解释,可以将 2d 图像贴到 3d 模型的 from 面。
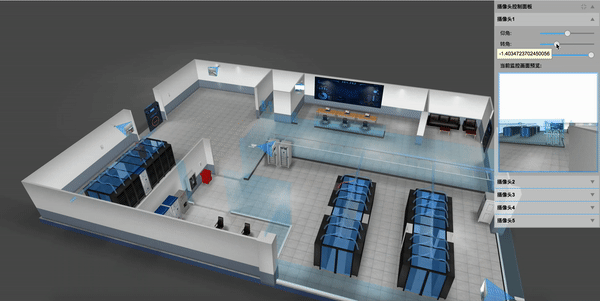
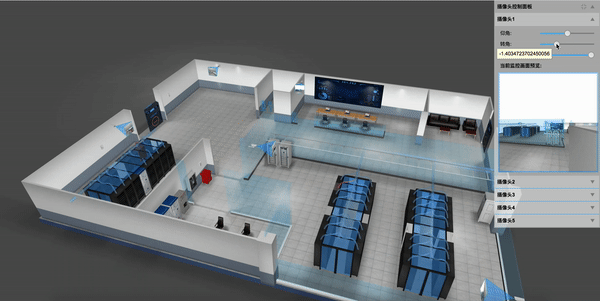
3、控制面板
HT 中通过 new ht.widget.Panel() 来生成如下图的面板:
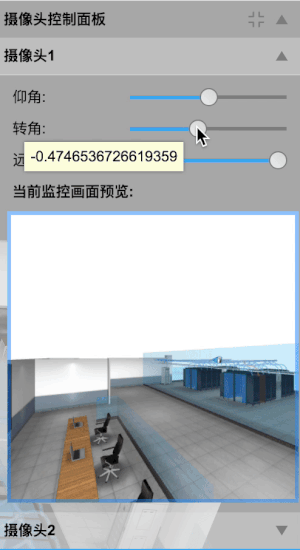
面板中每个摄像头都有一个模块来呈现当前监控图像,其实这个地方也是一个 canvas,该 canvas 与场景中锥体前面的监控图像是同一个 canvas,每一个摄像头都有一个自己的 canvas 用来保存当前摄像头的实时监控画面,这样就可以将该 canvas 贴到任何地方,将该 canvas 添加进面板的代码如下:
formPane.addRow([{ 2 element: camera.a('canvas') 3 }], 240, 240); 代码中将 canvas 节点存储在摄像头图元的 attr 属性下面,之后便可以通过camera.a('canvas') 来获取当前摄像头的画面。在面板中的每一个控制节点都是通过 formPane.addRow 来进行添加,具体可参考 HT for Web 的表单手册。之后通过 ht.widget.Panel 将表单面板 formPane 添加进 panel 面板中,具体可参考 HT for Web 的面板手册。
控制面板通过 addRow 来添加控制元素,实现的方式为添加摄像头绕着 y 轴进行旋转的控制,onValueChanged 在 slider 的数值改变的时候调用,此时通过 camera.r3() 获取当前摄像头的旋转参数, 由于是绕着 y 轴旋转所以 x 轴与 z 轴的角度是不变的,变的是 y 轴的旋转角度,所以通过 camera.r3([cameraR3[0], this.getValue(), cameraR3[2]]) 来调整摄像头的旋转角度以及通过 rangeNode.r3([cameraR3[0], this.getValue(), cameraR3[2]]) 来设置摄像头前方锥体的旋转角度,然后调用之前封装好的 getFrontImg 函数来获取此时旋转角度下面的实时图像信息。
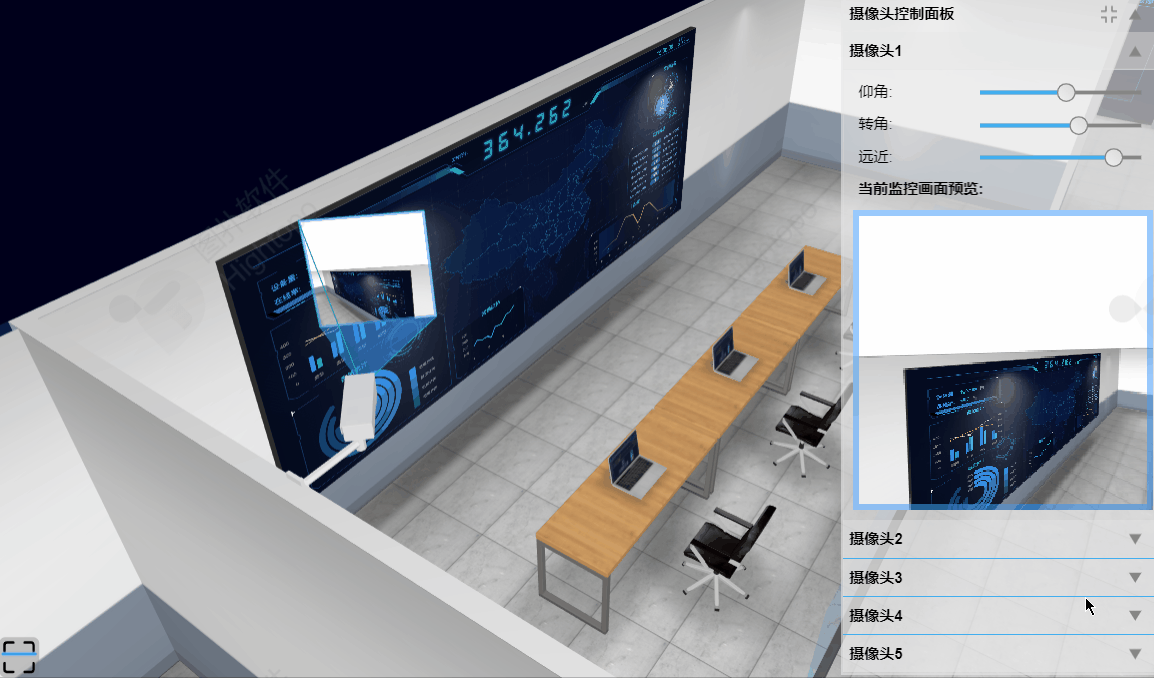
项目中通过 Panel 面板的配置参数 titleBackground: rgba(230, 230, 230, 0.4) 即可将标题背景设置为具有透明度的背景,其它类似的 titleColor, titleHeight 等标题参数都可以配置,通过 separatorColor,separatorWidth 等分割参数可以设置内部面板之间分割线的颜色,宽度等。最后面板通过 panel.setPositionRelativeTo('rightTop') 将面板的位置设置成右上角,并且通过 document.body.appendChild(panel.getView()) 将面板最外层的 div 添加进页面中, panel.getView() 用来获取面板的最外层 dom 节点。 在控制面板中可以调整摄像头的方向,摄像头监控的辐射范围,摄像头前方锥体的长度等等,并且摄像头的图像是实时生成,以下为运行截图:

总结