

Level 0:无自动化,驾驶员需要负责启动、制动、操作和观察道路状况。任何驾驶辅助技术,只要仍需要人控制汽车,都属于Level 0. 所以现有的前向碰撞预警,车道偏离预警以及自动雨刷和自动前灯控制,虽然有一定的智能化,都仍属于Level 0.
Level 1:单一功能级的自动化,驾驶员仍然对行车安全负责,但某些功能已经自动进行,比如常见的自适应巡航(Adaptive Cruise Control, ACC),应急刹车辅助(Emergency Brake Assist, EBA),车道保持(Lane-Keep Support,LKS)。特点是Level 1只有单一功能,驾驶员无法做到手和脚同时不操控。
Level 2: 多功能级的自动化,驾驶员在某些预设环境下可以不操作汽车,即手脚同时离开控制,但驾驶员仍然需要对驾驶安全负责,并随时准备在短时间里接管汽车驾驶权。比如结合了ACC和LKS形成的跟车功能。Level 2的核心不在于要有两个以上的功能,而在于驾驶员可以不再作为主要操作者。两周前Tesla新推送的autopilot也是Level 2的功能。
Level 3: 有限的自动驾驶,在预设的路段(如高速和人流较少的城市路段),汽车自动驾驶并承担架势安全的责任,驾驶员仍需要在某些时候接管汽车,但有足够的预警时间,如即将进入修路的路段(Road work ahead)。Level 3将解放驾驶员,即对行车安全不再负责,不必监视道路状况。
Level 4: 全自动驾驶,不再有驾驶员,仅需起点和重点信息,汽车将在全程负责行车安全,并完全不依赖驾驶员干涉。行车时可以没有人乘坐(如空车货运)。
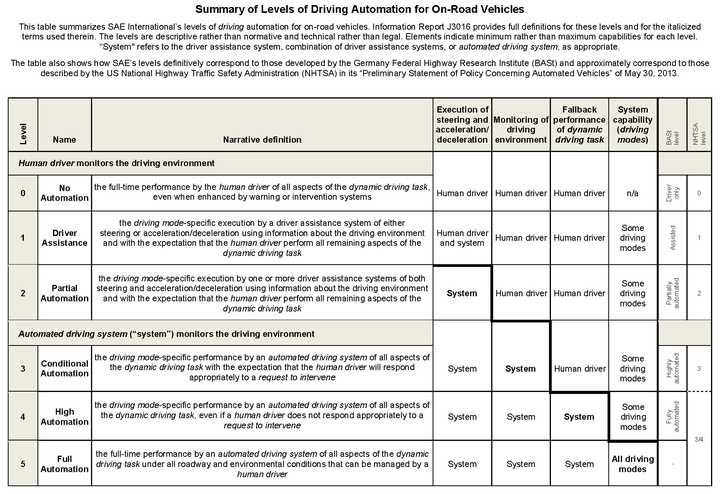
汽车工程师协会2013年也发布了类似的“分级”,细化了Level 3到Level 4之间的状态,附图如下,就不做解释了:
NHTSA分级的意义是分类,之后用于法律制定(特别是license)、保险、科研(特别是非技术科研)、测试(无人车的测试内容的制定,包括路测、网络安全、突发事件等)。
这里要特别说明的是,以上分级并不是Roadmap,也就是说实现全自动驾驶并不一定要从Level 1开始一步步的实现。新科技的发展向来不跟随人的预测,事实上,现在Level 1在工业界还没有做到很完善,但Level 3在低速情况下已经有量产(如Navia)。
Reference:
1. SAE Levels of Driving Automation
2. NHTSA's statement of policy on automated vehicles
