

前言
如果有这么一个需求,要监听所有OC方法的耗时时间,我们要如何实现?本文将描述如何利用 fishhook 去拦截底层的 objc_msgSend 实现,从而达到监控所有 OC 方法的目的。
Ps: 本文不涉及 objc_msgSend 源码解析,只专注于 Hook及耗时统计。对其底层实现有兴趣的可以查看 arm64下Objc_msgSend的实现注释 ,已详细注释了每句汇编代码。
基础知识
在开始之前,需要先了解些基础知识,有便于后续的阅读。
Fishhook
fishhook是facebook开源的老牌Hook框架,相比于利用消息转发机制实现 Method Swizzle,其在 dylib 链接 Mach-O 时,更改动态绑定地址,能实现系统C/C++函数的Hook,具体可查看笔者之前写的 Hook利器之fishhook。
arm64基础知识
由于 Objc_msgSend 使用汇编实现,所以我们需要学习些会用到的汇编指令,才能清晰的知道每一步在做什么。
arm64 有64位处理器,能同时处理64位数据,其每条指令固定长度为32bit,即4个字节。
arm64 有34个寄存器,其中包括31个通用寄存器、SP、PC、CPSR。
-
x0-x30
通常 x0 – x7 分别会存放方法的前 8 个参数,如果参数个数超过了8个,多余的参数会存在栈上,新方法会通过栈来读取。
当方法有返回值时,执行结束会将结果放在 x0 上,如果方法返回值是一个较大的数据结构时,结果则会存在 x8 执行的地址上。
x29 又称为FP,用于保存栈底地址。
x30 寄存器又称为LR,用于保存要执行的下一条指令,后面我们 Hook 时需要多次存取该寄存器。
w0-w30 表示访问其低32位寄存器
-
SP(x30)
栈寄存器,在任意时刻会保存我们栈顶的地址,后面我们会通过偏移它来暂存参数。
-
PC(x31)
存放当前执行的指令的地址,不可被修改。
-
SPRs
SPRs是状态寄存器,用于存放程序运行中一些状态标识。不同于编程语言里面的if else.在汇编中就需要根据状态寄存器中的一些状态来控制分支的执行。状态寄存器又分为 The Current Program Status Register (CPSR) 和 The Saved Program Status Registers (SPSRs)。 一般都是使用 CPSR, 当发生异常时, CPSR 会存入 SPSR 。当异常恢复,再拷贝 CPSR。了解即可。
会用到的汇编指令
| 指令 | 作用 |
|---|---|
| mov | 用寄存器之间的赋值 |
| str、stp | 存储指令,用于将一个/一对寄存器的数据写入内存中 |
| ldr、ldp | 加载指令,用于从内存读取一个/一对数据到寄存器 |
| b、bl、blr | 跳转指令,分别是不带返回、带返回、带返回并指定pc |
| ret | 子程序返回指令,返回地址默认保存在LR(X30) |
另外还有ADD、SUB、AND、CBZ等指令,在objc_msgSend源码里会用到,这里不涉及就不具体阐述了,有兴趣的可搜下arm64指令集。
在Xcode编写汇编需要用到 GCC内嵌汇编,有兴趣可以看下 ARM GCC内嵌, 仅做了解。
设计流程
设计思路: 当我们要统计函数的耗时,最直接的方式就是记录执行函数前和执行函数后的时间,差值就是所消耗时间。
- 使用 fishihook 对 objc_msgSend 进行替换,实现自己的 hook_objc_msgSend
- 通过汇编代码将调用时寄存器中的参数保存和恢复
- 实现调用前后的计时方法 before_objc_msgSend 和 after_objc_msgSend
由于存在多层级 objc_msgSend 调用,所以需要涉及一个调用栈来保存调用层级和起始时间。调用before_objc_msgSend时,都将最新的调用指令进行入栈操作,记录当前时间和调用层级,调用after_objc_msgSend时取出栈顶元素,即可得到方法及对应的耗时。
具体代码
设计调用栈及初始化变量
//用于记录方法
typedef struct {
Class cls;
SEL sel;
uint64_t time;
uintptr_t lr; // lr寄存器内的地址值
} MethodRecord;
//主线程方法调用栈
typedef struct {
MethodRecord *stack;
int allocCount; //栈内最大可放元素个数
int index; //当前方法的层级
bool isMainThread;
} ThreadMethodStack;
static id (*orgin_objc_msgSend)(id, SEL, ...);
static pthread_key_t threadStackKey;
static YEThreadCallRecord *threadCallRecords = NULL;
static int recordsCurrentCount;
static int recordsAllocCount;
static int maxDepth = 3; // 设置记录的最大层级
static uint64_t minConsumeTime = 1000; // 设置记录的最小耗时
定义两个结构体来构成我们的调用栈。
对 objc_msgSend 进行拦截
void startMonitor(void) {
static dispatch_once_t onceToken;
dispatch_once(&onceToken, ^{
pthread_key_create(&threadStackKey, cleanThreadStack);
struct rebinding rebindObjc_msgSend;
rebindObjc_msgSend.name = "objc_msgSend";
rebindObjc_msgSend.replacement = hook_objc_msgSend;
rebindObjc_msgSend.replaced = (void *)&orgin_objc_msgSend;
struct rebinding rebs[1] = {rebindObjc_msgSend};
rebind_symbols(rebs, 1);
});
}
// 线程私有数据的清理函数
void cleanThreadStack(void *ptr) {
if (ptr != NULL) {
ThreadMethodStack *threadStack = (ThreadMethodStack *)ptr;
if (threadStack->stack) {
free(threadStack->stack);
}
free(threadStack);
}
}
// 获取当前线程的调用栈
ThreadMethodStack* getThreadMethodStack() {
ThreadMethodStack *tms = (ThreadMethodStack *)pthread_getspecific(threadStackKey);
if (tms == NULL) {
tms = (ThreadMethodStack *)malloc(sizeof(ThreadMethodStack));
tms->stack = (MethodRecord *)calloc(128, sizeof(MethodRecord));
tms->allocLength = 64;
tms->index = -1;
tms->isMainThread = pthread_main_np();
pthread_setspecific(threadStackKey, tms);
}
return tms;
}
由于 objc_msgSend 会在多个线程被调用,所以需要让保证当前线程的调用栈不被其他线程修改,这时就用到了 pthread_key_create 线程私有数据概念,关于这部分内容可查看笔者之前的文章 什么是线程私有数据 。
利用 fishhook 提供的 api 将 objc_msgSend 替换成我们的 hook_objc_msgSend, 并创建一个key为 _thread_key 线程私有数据方便后续存放调用栈。
实现自定义 hook_objc_msgSend
void before_objc_msgSend(id self, SEL _cmd, uintptr_t lr) {
ThreadMethodStack *tms = getThreadMethodStack();
if (tms) {
int nextIndex = (++tms->index);
if (nextIndex >= tms->allocCount) {
tms->allocCount += 64;
tms->stack = (MethodRecord *)realloc(tms->stack, tms->allocCount * sizeof(MethodRecord));
}
MethodRecord *newRecord = &tms->stack[nextIndex];
newRecord->cls = object_getClass(self);
newRecord->sel = _cmd;
newRecord->lr = lr;
if (tms->isMainThread) {
struct timeval now;
gettimeofday(&now, NULL);
newRecord->time = (now.tv_sec % 100) * 1000000 + now.tv_usec;
}
}
}
uintptr_t after_objc_msgSend() {
ThreadMethodStack *tms = getThreadMethodStack();
int curIndex = tms->index;
int nextIndex = tms->index--;
MethodRecord *record = &tms->stack[nextIndex];
if (tms->isMainThread) {
struct timeval now;
gettimeofday(&now, NULL);
uint64_t time = (now.tv_sec % 100) * 1000000 + now.tv_usec;
if (time < record->time) {
time += 100 * 1000000;
}
uint64_t cost = time - record->time;
if (cost > minConsumeTime && tms->index < maxDepth) {
// 为记录栈分配内存
if (!threadCallRecords) {
recordsAllocCount = 1024;
threadCallRecords = malloc(sizeof(threadCallRecords) * recordsAllocCount);
}
recordsCurrentCount++;
if (recordsCurrentCount >= recordsAllocCount) {
recordsAllocCount += 1024;
threadCallRecords = realloc(threadCallRecords, sizeof(threadCallRecords) * recordsAllocCount);
}
// 添加记录元素
YEThreadCallRecord *yeRecord = &threadCallRecords[recordsCurrentCount - 1];
yeRecord->cls = record->cls;
yeRecord->depth = curIndex;
yeRecord->sel = record->sel;
yeRecord->time = cost;
}
}
// 恢复下条指令
return record->lr;
}
//arm64标准:sp % 16 必须等于0
#define saveParameters() \
__asm volatile ( \
"str x8, [sp, #-16]!\n" \
"stp x6, x7, [sp, #-16]!\n" \
"stp x4, x5, [sp, #-16]!\n" \
"stp x2, x3, [sp, #-16]!\n" \
"stp x0, x1, [sp, #-16]!\n");
#define loadParameters() \
__asm volatile ( \
"ldp x0, x1, [sp], #16\n" \
"ldp x2, x3, [sp], #16\n" \
"ldp x4, x5, [sp], #16\n" \
"ldp x6, x7, [sp], #16\n" \
"ldr x8, [sp], #16\n" );
// 前置方法的返回值会储存在x8上,所以调用我们自己的方法前先保存下x8,接着将方法加载到x12中去执行指令
#define call(b, value) \
__asm volatile ("str x8, [sp, #-16]!\n"); \
__asm volatile ("mov x12, %0\n" :: "r"(value)); \
__asm volatile ("ldr x8, [sp], #16\n"); \
__asm volatile (#b " x12\n");
// 替换的objc_msgSend
__attribute__((__naked__))
static void hook_objc_msgSend() {
// 存原调用参数
saveParameters()
// 将lr存放的指令放在x2,作为before_objc_msgSend参数
__asm volatile ("mov x2, lr\n");
// Call our before_objc_msgSend.
call(blr, &before_objc_msgSend)
// 恢复参数
loadParameters()
// 调用objc_msgSend
call(blr, orgin_objc_msgSend)
saveParameters()
// Call our after_objc_msgSend.
call(blr, &after_objc_msgSend)
// x0存的是after_objc_msgSend返回的下条指令,返回给lr指针
__asm volatile ("mov lr, x0\n");
// Load original objc_msgSend return value.
loadParameters()
// 返回
__asm volatile ( "ret");
}
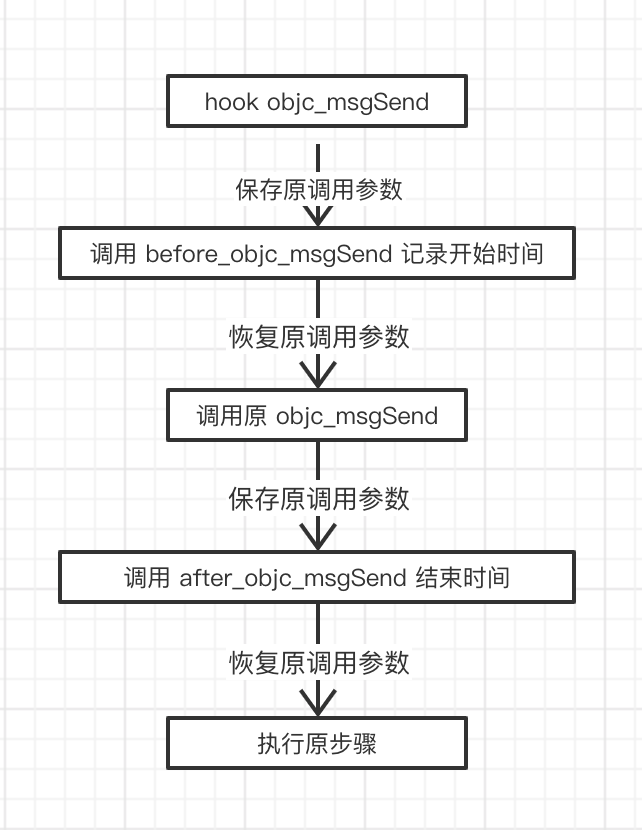
实现比较简单,将寄存器x0至x8的内容保存到栈内存中,调用 before_objc_msgSend 创建当前方法对应结构体 MethodRecord ,记录当前时间、方法信息并保存 lr 指针后,恢复x0至x8的内容调用原 objc_msgSend;调用结束后再次重复存取寄存器内容,将 MethodRecord 取出计算整体耗时。
需要注意的是,当我们在 objc_msgSend 的过程中调用自定义的函数时,会改变 lr 寄存器中的值,导致最后的 ret函数 找不到下一条指令,所以需要在 before_objc_msgSend 记录 lr值,并在 after_objc_msgSend 恢复。
拓展
通过Aspects实现耗时监控
在写本文时,初期尝试过用 Aspects 框架实现耗时监控,这里列出当时的思考。
- 实现方式
- 遍历需要Hook的类
- objc_copyClassNamesForImage 获取开发者创建的类
- objc_getClassList 获取所有类
- 手动注入要Hook的类
- 获取每个类的方法( class_copyMethodList )
- 通过Aspects前后插桩获取时间计算差值
- 遍历需要Hook的类
- 一些问题
- 由于不知道调用顺序,实现记录调用层级困难
- 类和方法较多时hook时间较久
- 相比于汇编实现,性能较差
工具封装
OCTimeConsumeMonitor
将耗时监控简单封装了下,实现了基本的 UI 布局,可折叠调用层级、排序耗时等,方便查看。
参考链接
About Me 🐝
今年计划完成10个优秀第三方源码解读,会陆续提交到 iOS-Framework-Analysis ,欢迎 star 项目陪伴笔者一起提高进步,若有什么不足之处,敬请告知 🏆。
