

该原创文章首发于微信公众号:字节流动
OpenGLES 3D 模型

OpenGLES 3D 模型本质上是由一系列三角形在 3D 空间(OpenGL 坐标系)中构建而成,另外还包含了用于描述三角形表面的纹理、光照、材质等信息。
构建一些规则的 3D 物体,如立方体、球体、椎体等,我们自己可以手动轻易实现,但是在实际开发中往往会用到复杂的 3D 物体,如人体、汽车等,这就需要设计师和专业的建模工具软件(像 3DS Max、Maya )来生成。
利用 3D 建模软件,设计师可以构建一些复杂的形状,并将贴图应用到形状上去,不需要去关注图像技术细节。最后在导出模型文件时,建模工具会自己生成所有的顶点坐标、顶点法线和纹理坐标。
常用的模型文件格式有 .obj、.max、.fbx .3ds 等,其中 .obj 是 Wavefront 科技开发的一种几何体图形文件格式,包含每个顶点的位置、纹理坐标、法线,以及组成面(多边形)的顶点列表等数据,应用较为广泛。
OBJ 文件的结构
本文主要介绍 obj 3D 模型文件及其附属文件 mtl ,下面是 obj 模型文件的数据结构(为了方便展示部分数据被略过)。
# 3ds Max Wavefront OBJ Exporter v0.97b - (c)2019 guruware
# File Created: 25.01.2019 02:22:51
mtllib earth.mtl
v -4.4189 340.8998 -4.2436
v -4.4189 339.2582 -37.6576
v -7.6941 339.2582 -37.4967
v -10.9377 339.2582 -37.0156
v -14.1185 339.2582 -36.2188
v -17.2059 339.2582 -35.1141
...
# 1986 vertices
vn -0.0000 1.0000 0.0000
vn 0.0000 0.9950 -0.0995
vn -0.0098 0.9950 -0.0991
vn -0.0194 0.9950 -0.0976
vn -0.0289 0.9950 -0.0952
vn -0.0381 0.9950 -0.0920
vn -0.0469 0.9950 -0.0878
...
# 1986 vertex normals
vt 0.0000 1.0000 0.0000
vt 0.0000 0.9688 0.0000
vt 0.0156 0.9688 0.0000
vt 0.0156 1.0000 0.0000
vt 0.0313 0.9688 0.0000
vt 0.0313 1.0000 0.0000
...
# 2143 texture coords
usemtl 01___Default
s 1
f 1/1/1 2/2/2 3/3/3
f 1/4/1 3/3/3 4/5/4
f 1/6/1 4/5/4 5/7/5
f 1/8/1 5/7/5 6/9/6
f 1/10/1 6/9/6 7/11/7
...
OBJ 文件数据结构的简单说明:
#开头的行表示注释行;mtllib表示指定该 OBJ 文件所使用的 mtl 文件(材质文件);v开头的行表示存放的是顶点坐标,后面三个数分别表示一个顶点的(x,y,z)坐标值;vn开头的行表示存放的是顶点法向量,后面三个数分别表示一个顶点法向量的三维(x,y,z)分量值;vt开头的行表示存放的是纹理坐标,后面三个数分别表示一个纹理坐标的(s,t,p)分量值,其中 p 分量一般用于 3D 纹理;usemtl 01___Default表示使用指定 mtl 文件中名为01___Default的材质;s 1表示开启平滑渲染;f开头的行表示存放的是一个三角面的信息,后面有三组数据分别表示组成三角面的三个顶点的信息,每个顶点信息的格式为:顶点位置索引/纹理坐标索引/法向量索引。
mtl 文件的结构:
# 3ds Max Wavefront OBJ Exporter v0.97b - (c)2019 guruware
# File Created: 25.01.2019 02:22:51
newmtl 01___Default
Ns 10.0000
Ni 1.5000
d 1.0000
Tr 0.0000
Tf 1.0000 1.0000 1.0000
illum 2
Ka 0.0000 0.0000 0.0000
Kd 0.0000 0.0000 0.0000
Ks 0.0000 0.0000 0.0000
Ke 0.0000 0.0000 0.0000
map_Ka 4096_earth.jpg
map_Kd 4096_earth.jpg
map_Ke 4096_night_lights.jpg
map_bump 4096_bump.jpg
bump 4096_bump.jpg
newmtl 02___Default
Ns 10.0000
Ni 1.5000
d 1.0000
Tr 0.0000
Tf 1.0000 1.0000 1.0000
illum 2
Ka 0.5882 0.5882 0.5882
Kd 0.5882 0.5882 0.5882
Ks 0.0000 0.0000 0.0000
Ke 0.0000 0.0000 0.0000
map_Ka 4096_clouds.jpg
map_Kd 4096_clouds.jpg
map_d 4096_clouds.jpg
mtl 文件结构说明:
newmtl 01___Default表示定义一个名为01___Default的材质;Ns表示材质的反射指数,反射指数越高则高光越密集,取值范围在一般为 [0,1000];Ni表示材质的折射值(折射率),一般取值范围是 [0.001,10] ,取值为 1.0,表示光在通过物体的时候不发生弯曲,玻璃的折射率为 1.5 ;d表示材质的渐隐指数(通透指数),取值为 1.0 表示完全不透明,取值为 0.0 时表示完全透明;Tr表示材质的透明度(与d的取值相反),默认值为0.0(完全不透明);Tf表示材质的滤光折射率,三维向量表示;illum表示材质的光照模型;Ka表示材质的环境光(Ambient Color)(r,g,b);Kd表示材质的散射光(Diffuse Color)(r,g,b);Ks表示材质的镜面光(Apecular Color)(r,g,b);Ke表示材质的发射光,它与环境光,散射光和镜面光并存,代表材质发出的光量;map_Ka表示为材质的环境反射指定纹理文件(纹理采样值与环境光相乘作为输出颜色的一部分加权);map_Kd表示为材质的漫反射指定纹理文件;map_Ke表示为材质的发射光指定纹理文件;map_d表示为材质的透明度指定纹理文件;bump表示指定材质的凹凸纹理文件,凹凸纹理修改表面法线,用于凹凸纹理的图像表示相对于平均表面的表面拓扑或高度(没用过)。
模型加载库 Assimp
Assimp 全称为 Open Asset Import Library,可以支持几十种不同格式的模型文件的解析(同样也可以导出部分模型格式),Assimp 本身是 C++ 库,可以跨平台使用。
Assimp 可以将几十种模型文件都转换为一个统一的数据结构,所有无论我们导入何种格式的模型文件,都可以用同一个方式去访问我们需要的模型数据。
当导入一个模型文件时,Assimp 将加载该模型文件所包含的所有模型和场景数据到一个 scene 对象,为这个模型文件中的所有场景节点、模型节点都生成一个具有对应关系的数据结构,如下图所示:
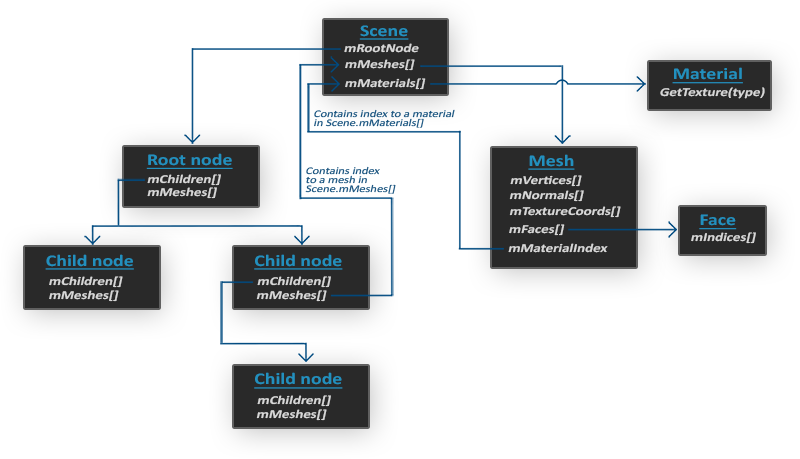
一个模型往往是由很多小模型组成,这些小模型在 Assimp 中称之为 Mesh ,Mesh 进行独立渲染,Mesh 对象本身包含渲染所需的所有相关数据,比如顶点位置、法向量、纹理坐标以及物体的材质。
编译模型加载库 Assimp
Assimp 源代码地址:https://github.com/assimp/assimp
环境准备:
Windows 7
Android Studio 版本> 2.3.0 (带有 NDK 和 CMake)
Python 3.5
- 从 Github 下载 Assimp(本文使用的是 assimp-v.5.0.0) 源码并解压到一个新建文件夹 BuildAssimp 中;
- 在 BuildAssimp 文件夹新建一个 make_standalone_toolchain.bat 文件用于创建编译所需的工具链,该文件内容如下:
python D:/AndroidSDK/Sdk/ndk-bundle/build/tools/make_standalone_toolchain.py --arch=arm --stl=libc++ --api=24 --install-dir=android-toolchain-24-llvm-arm
D:/AndroidSDK/Sdk/ndk-bundle/build/tools/make_standalone_toolchain.py 需要换成你本地的 Android SDK 中的工具链构建脚本。
双击脚本,执行完成后,会在当前目录下(BuildAssimp 文件夹中)生成一个新的文件夹 android-toolchain-24-llvm-arm ,它是我们用于编译 32 位的 assimp 库用到的工具链。
- 在 BuildAssimp 文件夹中新建一个 build_assimp.bat 文件,用于编译生成 assimp.so 文件,其内容如下:
@echo off
cls
REM *NOTE* Change these based on
SET ASSIMP_DIR=assimp-v.5.0.0
SET OUTPUT_DIR=assimp-build-arm
SET ANDROID_PATH=D:\AndroidSDK\Sdk
SET NDK_PATH=D:\AndroidSDK\Sdk\ndk-bundle
SET NDK_TOOLCHAIN=%~dp0android-toolchain-24-llvm-arm
SET CMAKE_TOOLCHAIN=%NDK_PATH%\build\cmake\android.toolchain.cmake
SET CMAKE_PATH=%ANDROID_PATH%\cmake\3.6.4111459
REM *NOTE* Careful if you don't want rm -rf, I use it for testing purposes.
del /F /S /Q %OUTPUT_DIR%
mkdir %OUTPUT_DIR%
REM pushd doesn't seem to work ):<
cd %OUTPUT_DIR%
if not defined ORIGPATH set ORIGPATH=%PATH%
SET PATH=%CMAKE_PATH%\bin;%ANDROID_PATH%\tools;%ANDROID_PATH%\platform-tools;%ORIGPATH%
cmake ^
-GNinja ^
-DCMAKE_TOOLCHAIN_FILE=%CMAKE_TOOLCHAIN% ^
-DASSIMP_ANDROID_JNIIOSYSTEM=ON ^
-DANDROID_NDK=%NDK_PATH% ^
-DCMAKE_MAKE_PROGRAM=%CMAKE_PATH%\bin\ninja.exe ^
-DCMAKE_BUILD_TYPE=Release ^
-DANDROID_ABI="armeabi-v7a" ^
-DANDROID_NATIVE_API_LEVEL=24 ^
-DANDROID_FORCE_ARM_BUILD=TRUE ^
-DCMAKE_INSTALL_PREFIX=install ^
-DANDROID_STL=c++_static ^
-DCMAKE_CXX_FLAGS=-Wno-c++11-narrowing ^
-DANDROID_TOOLCHAIN=clang ^
-DASSIMP_BUILD_TESTS=OFF ^
../%ASSIMP_DIR%
cmake --build .
cd ..
pause
这里需要配置你的 Android SDK 和 NDK path 。
双击脚本,执行完成后,会在 BuildAssimp 文件夹下生成一个新的文件夹 android-toolchain-24-llvm-arm ,编译通过后会在 android-toolchain-24-llvm-arm/code/ 下生成 32 位的 assimp.so 文件。
下一节中将会使用 assimp.so 去加载 obj 模型文件,然后利用 OpenGL ES 渲染模型。
联系与交流

