

从线性可分到线性不可分
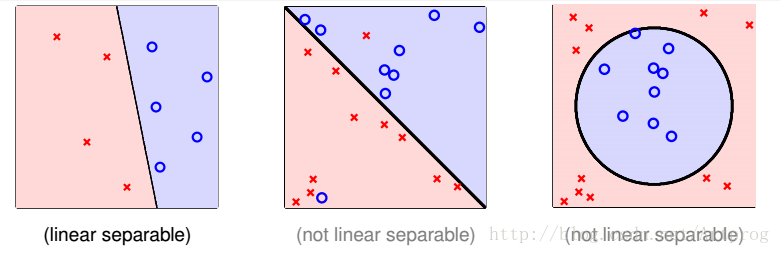
PLA 从线性可分到线性不可分,有 3 种不同的形态。
线性可分:PLA
一点点错误:Pocket Algorithm
严格非线性: + PLA
接下来,详细解释下,这三种模型如何而来。
PLA 的演变过程
PLA 全称是 Perceptron Linear Algorithm,即线性感知机算法,属于一种最简单的感知机(Perceptron)模型。
感知机模型是机器学习二分类问题中的一个非常简单的模型。它的基本结构如下图所示:
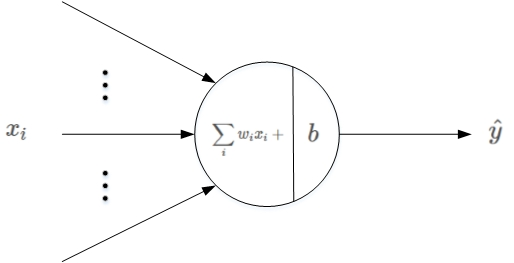
其中, 是输入,
表示权重系数,b 表示偏移常数。感知机的线性输出为:
其中,y={+1, -1}。简单来说,它由线性得分计算和阈值比较两个过程组成,最后根据比较结果判断样本属于正类还是负类。
1. PLA 分类的原理
对于二分类问题,可以使用感知机模型来解决。PLA 的基本原理就是逐点修正,首先在超平面上随意取一条分类面,统计分类错误的点;然后随机对某个错误点就行修正,即变换直线的位置,使该错误点得以修正;接着再随机选择一个错误点进行纠正,分类面不断变化,直到所有的点都完全分类正确了,就得到了最佳的分类面。
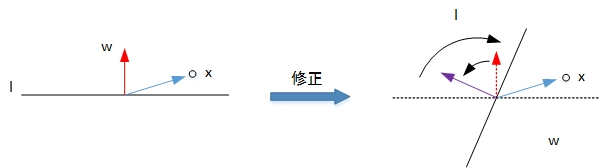
利用二维平面例子来进行解释,第一种情况是错误地将正样本 ( y = 1) 分类为负样本 ( y = -1 )。此时,,即
与
的夹角大于 90 度,分类线
的两侧。修正的方法是让夹角变小,修正
值,使二者位于直线同侧:
修正过程示意图如下所示:

第二种情况是错误地将负样本 ( y = -1) 分类为正样本 ( y = 1 )。此时,,即
与
的夹角小于 90 度,分类线
的同一侧。修正的方法是让夹角变大,修正
值,使二者位于直线两侧:
修正过程示意图如下所示:
经过两种情况分析,我们发现 PLA 每次 的更新表达式都是一样的:
。掌握了每次
的优化表达式,那么 PLA 就能不断地将所有错误的分类样本纠正并分类正确。

2. Pocket Algorithm:允许一点错误
为了避免上面线性不可分的情况,将PLA的条件放宽一点,不再要求所有的样本都能正确的分开,而是要求犯错误的样本尽可能的少,即将问题变为了:
也就是说去寻找一条犯错最少的线或者超平面。
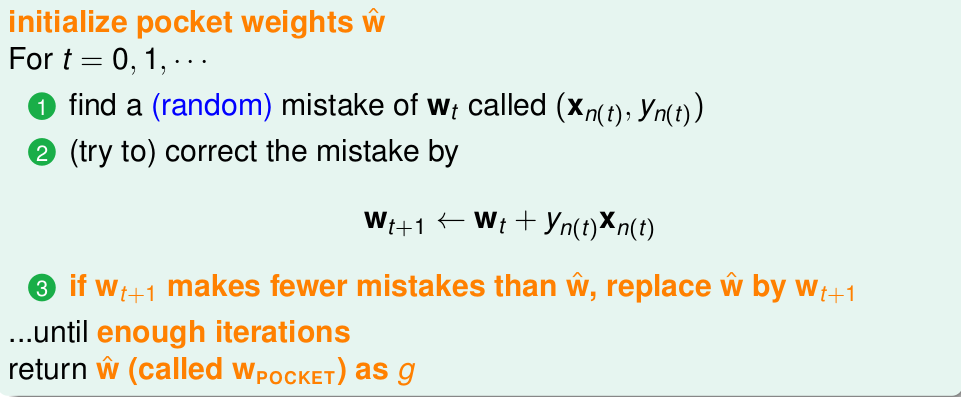
其实,从实际意义上,是不能的,这是一个 NP hard 问题,因为线有无穷多个。无法求出最优解,因此只能求尽可能接近其最优解的近似解,这种方法被称为 Pocket Algorithm,口袋算法。
口袋算法属于贪心的思想,它总是让遇到的最好的线或超平面拿在自己手里。
简单介绍一下:首先,我们有一条分割线 ,将数据实例不断带入,发现数据点
在上面出现错误分类,那么我们就纠正分割线得到
,如果
犯的错误少,就将
放到口袋里,否则
不变。
那么如何让算法停下来呢?
由于口袋算法得到的线越来越好 (PLA 就不一定了,PLA 是最终结果最好),所以我们就自己规定迭代次数。
Pocket Algorithm 与 PLA 相比?
线性可分的情况下:PLA 更好。先不说 PLA 可以找到最好的那条线,单从效率上来说,PLA 也更好些,最主要的原因是,Pocket Algorithm 每次比较的时候,都要遍历所有的数据点,且两个算法都要遍历一遍,才会决定那个算法好,而这还是比较一次,如果我们让他迭代 500 次的,那就麻烦了。
线性不可分的情况下:如果线性不可分,只能用 Pocket Algorithm,因为 PLA 根本不会停下来(而且 PLA 的 也不是每更改一次效果就会比之前的好)
总结
- Pocket Algorithm 事先设定迭代次数,而不是等着算法自己收敛到最优。
- 随机遍历数据集,而不是循环遍历。
- 遇到错误点校正时,只有当新得到的
对于所有的数据优于旧
3. 线性可分到线性不可分
PLA 的非线性可分类似 SVM 的对偶问题一样,在所有 和
的更新中,假设
点贡献了
次,令
,则
可表示为:
所以感知机的模型又可以表示成:
将 PLA 的输入空间通过核函数映射到高维,实现线性可分。
更多优质内容,请转移公号【随时学丫】

